



























Chapter 6 How Turfmow 1000 works
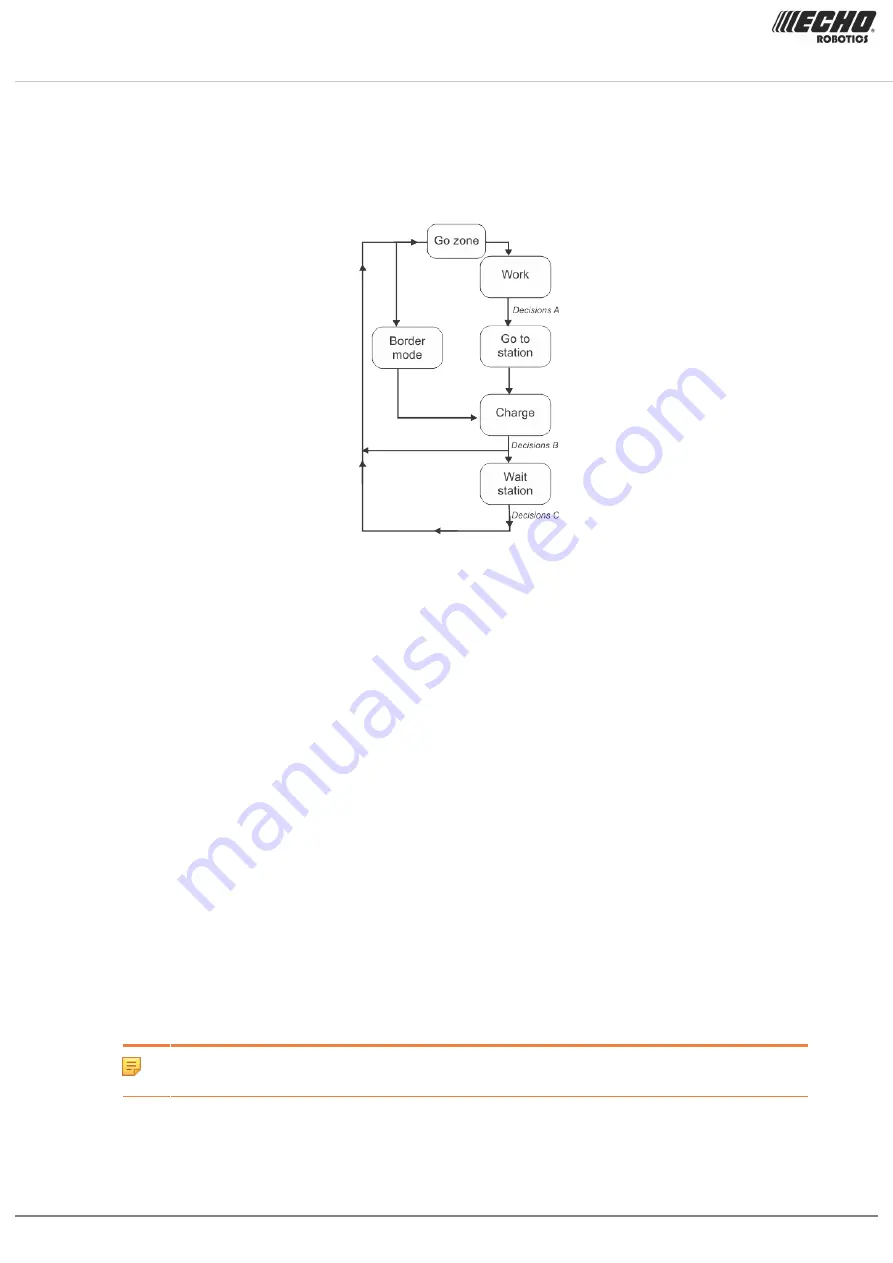
6.1 Autonomous mission state
Figure 17: Autonomous mission state
Work
In this mode the robot mows the grass in a random fashion. For more details see
(page 23).
Go to station
At a certain moment, which depends on the program and the current conditions, the
robot will make the decision to move to the charging station. For more details see
(page 25).
Charge
In this mode, the robot connects to the charging station and charges the battery. For more
details see
(page 29).
Wait station
When the battery has been charged, the robot may remain at the charging station,
depending on the program and the current conditions. For more details see
(page 30).
Border mode
In this mode the robot mows the border of the field. For more details see
(page 30).
Go zone
In this mode the robot goes through a set of maneuvers before entering the work mode.
For more details see
(page 31).
Note: Programmed instructions can be over-ridden by instructions activated from the
(page 96).
22 Turfmow 1000 Technician's Manual
Version: Release 3.5
Last updated: 2018-12-20






































































