



























Chapter 6 How Turfmow 1000 works
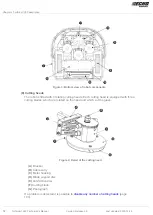
6.1.1 Work mode
(page 31)
Figure 18: Work mode
When in work mode mows the grass in the field (inside the peripheral wire). It executes a
random movement over the field to ensure that the whole field is covered and that the robot's
wheels do not leave traces on the grass.
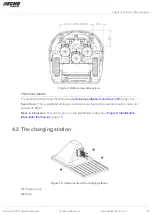
Figure 19: Random movement within the peripheral wire
The charging station emits a signal that generates an electro-magnetic field within the area
bounded by the peripheral wire. The robot is equipped with a coil that senses the magnetic
field.
The strength of the electro-magnetic field is greatest at the boundary and as the robot arrives
at the wire, it slows down. It then passes over the wire and the coil senses a change in phase.
This causes the robot to stop, reverse a little, turn through a random bounce angle and then
Turfmow 1000 Technician's Manual
Version: Release 3.5
Last updated: 2018-12-20
23







































































