



























Chapter 6 How Turfmow 1000 works
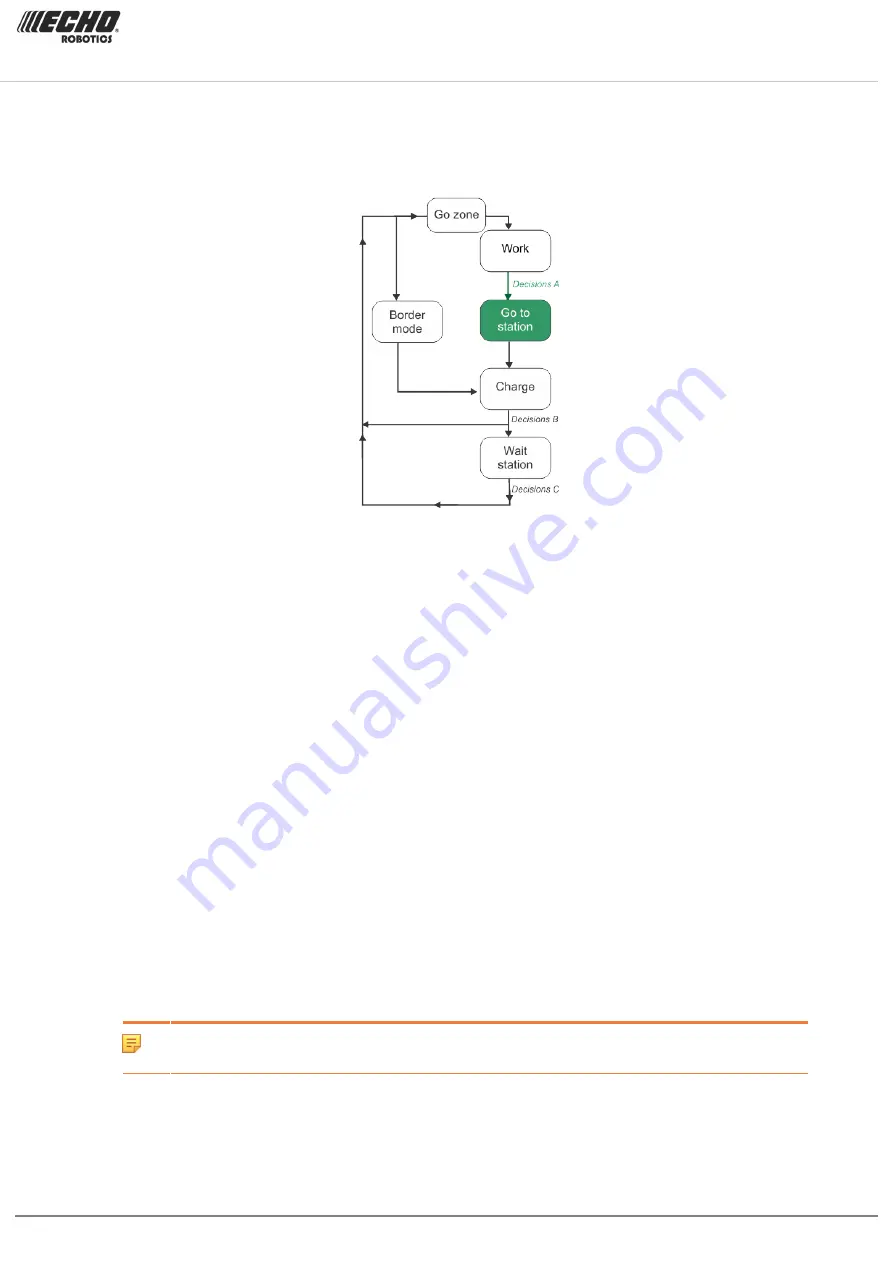
6.1.2 Go to charging station mode
Figure 21: Go to station mode
Whilst working, the robot checks the current conditions and its programmed instructions.
These conditions could be:
•
The battery needs charging,
•
The programmed mowing time has ended,
(In the case of multi-field installations, this corresponds to the mowing schedule for the
parcel in which the robot is currently mowing.)
•
An (external) command has been issued from the
(page 96),
•
The temperature is too low.
As a consequence, at a certain moment, it will decide to return to its charging station. The
maneuvers used to return to the station depend on the type of installation.
-
Single mowing field with positioning beacon
(page 25)
-
Multiple mowing fields with positioning beacon
(page 26)
-
Single mowing field with station loop
(page 27)
-
Multiple mowing fields with station loop
(page 28)
6.1.2.1 Single mowing field with positioning beacon
This chapter describes how the robot returns to the charging station from a single mowing
area using a positioning beacon to locate the station.
Note: The positioning beacon is normally located in the charging station, but it may be
mounted separately.
Turfmow 1000 Technician's Manual
Version: Release 3.5
Last updated: 2018-12-20
25







































































