



























Chapter 6 How Turfmow 1000 works
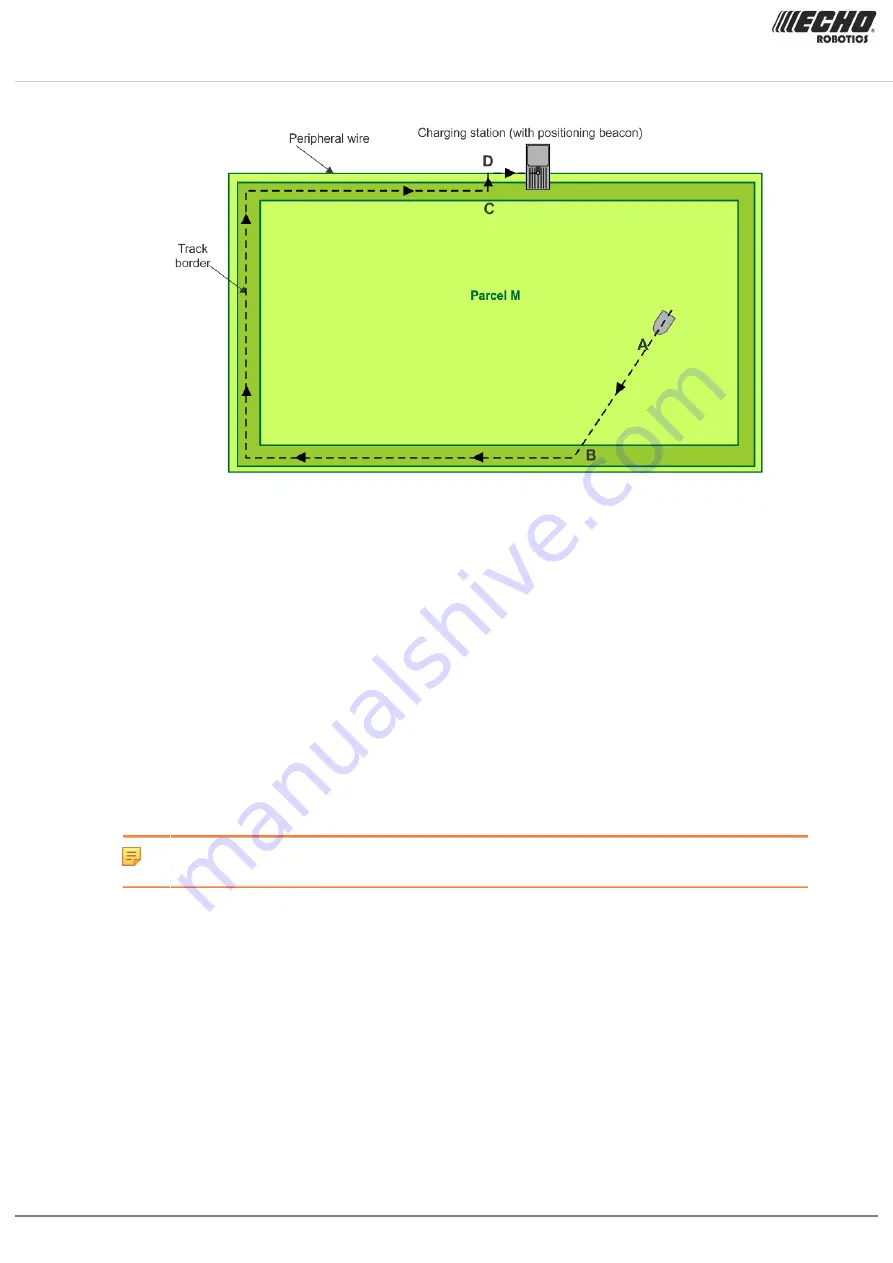
At a certain point (A), the robot will decide it needs to return to the charging station. It will then
proceed to the nearest point B that lies within the
(page 201).
The robot then follows the track border until it reaches point C where it is at a certain distance
from the charging station.
At point C, the robot will turn through 90
o
and move directly to point D, which is on the wire.
(page 200).
The robot will turn again through 90
o
and move along the peripheral wire towards the
charging station. This manoeuvre is termed the
(page 202).
Once the robot has arrived at the charging station, it enters
(page 29).
6.1.2.2 Multiple mowing fields with positioning beacon
This chapter describes how the robot returns to the charging station, through a series of
mowing fields, using a positioning beacon to locate the station.
Note: The positioning beacon is normally located in the charging station, but it may be
mounted separately.
26 Turfmow 1000 Technician's Manual
Version: Release 3.5
Last updated: 2018-12-20







































































