




























Chapter 6 How Turfmow 1000 works
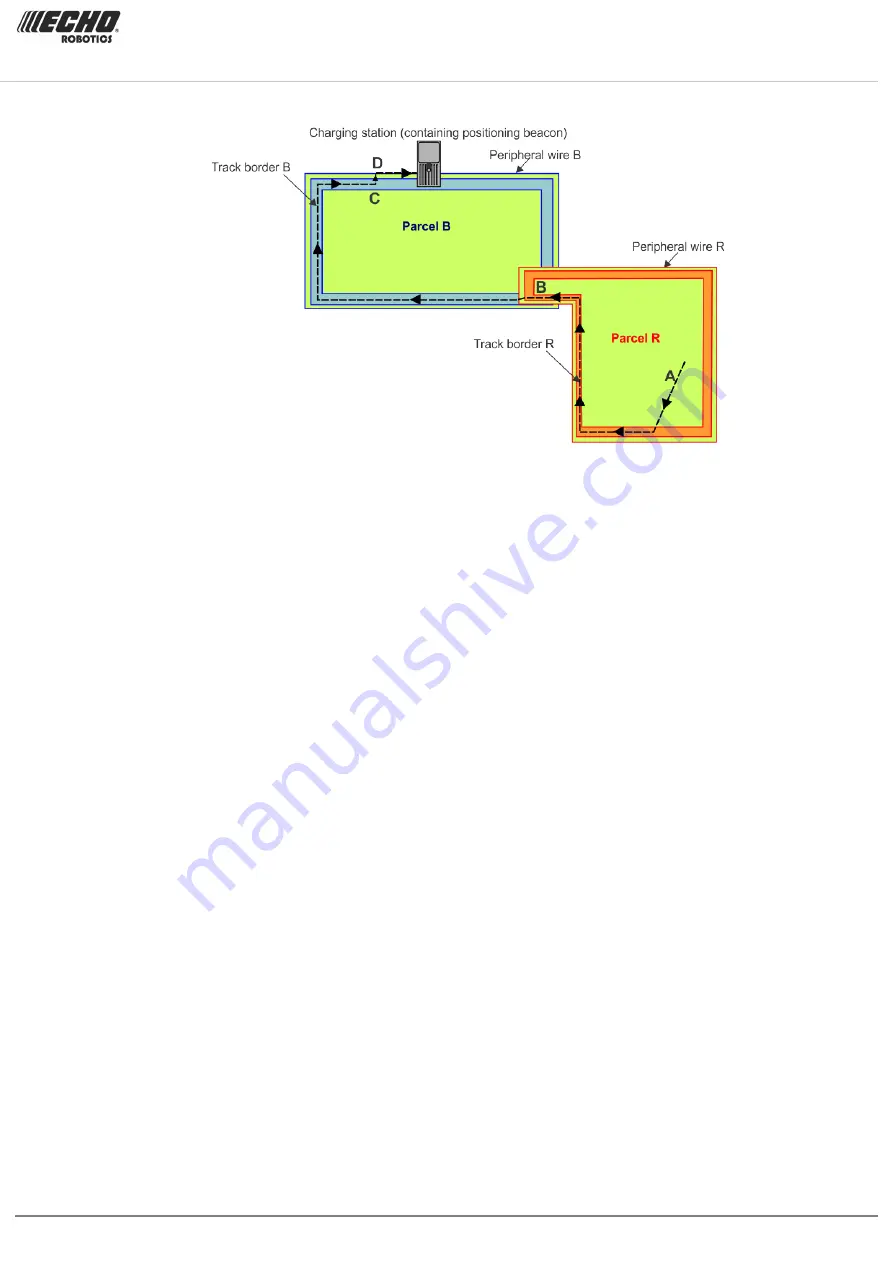
At point A, the robot decides it needs to return to the charging station. It moves towards the
track border in "Parcel R" and then follows "Track border R" until it reaches point B, which is
where the two fields overlap.
It then follows "Track border B" until it reaches point C. At this point it turns through 90
o
,
executing the
(page 200) to turn towards "Peripheral wire B" at point D. When it
reaches the wire at point E, it turns through 90
o
again and
(page 202) to
arrive at the charging station.
Once the robot has arrived at the charging station, it enters
(page 29).
6.1.2.3 Single mowing field with station loop
This chapter describes how the robot returns to the charging station from a single mowing
area using a
(page 201) to locate the station. This is illustrated in the figure
below.
Turfmow 1000 Technician's Manual
Version: Release 3.5
Last updated: 2018-12-20
27







































































