





























Chapter 6 How Turfmow 1000 works
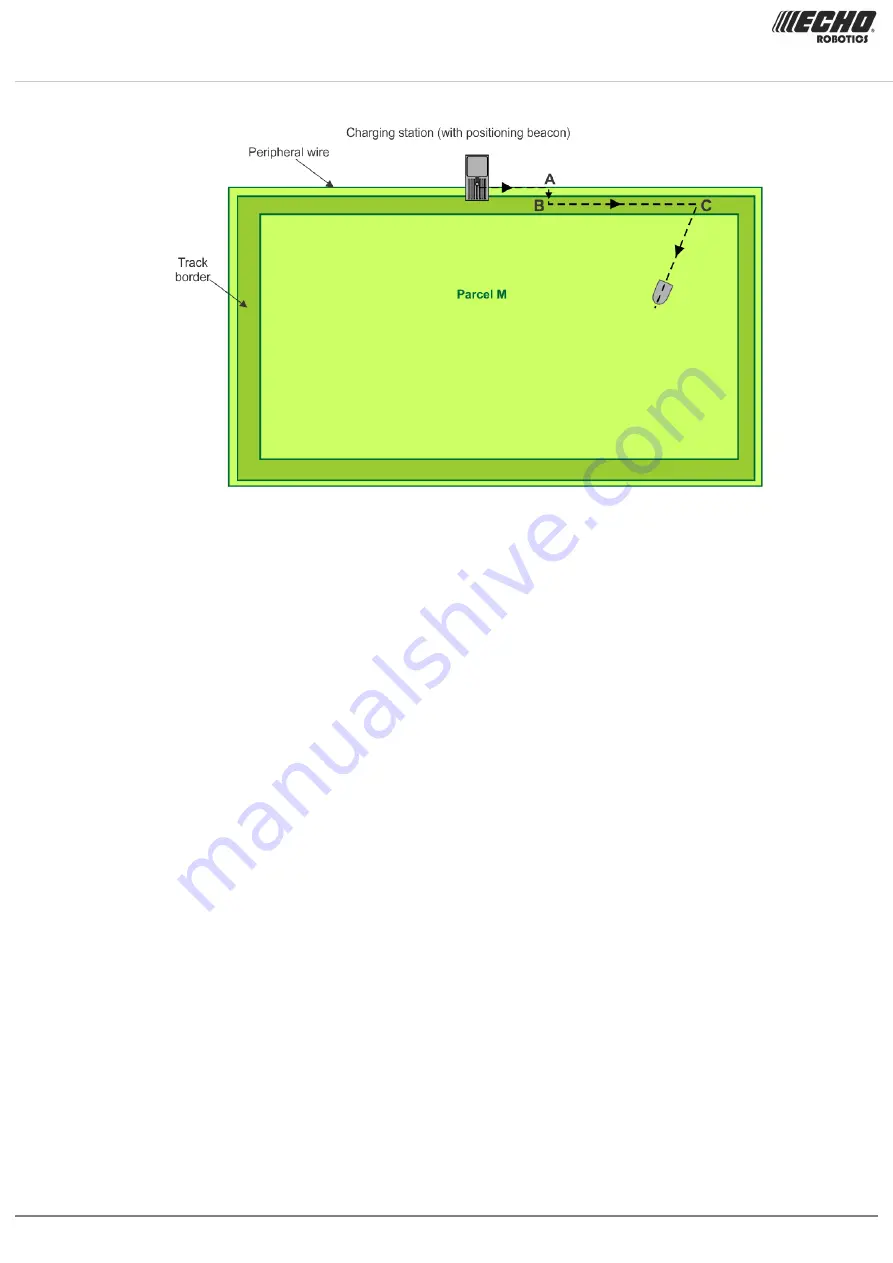
The robot leaves the station and follows the wire (
(page 202)) until it
reaches point A. At point A it executes the
(page 200) move, turning through 90
o
(page 201). At point B the robot turns again and follows the
track border until it reaches point C. The robot then turns through a random angle and moves
into the field to start mowing.
The parameters specifying how the robot leaves the station are defined in the
(page 200) and the
(page 200) parameters for the station.
6.1.6.2 Multiple mowing fields with positioning beacon
In this configuration there are multiple wires, each defining a parcel (area to be mowed).
Before leaving the station the robot must decide in which parcel to start mowing. This will
depend on:
•
The defined mowing schedule for each parcel.
If the schedule dictates that a specific parcel must be mowed at this time, the robot will
start mowing in that parcel.
•
The percentage values assigned to each parcel.
If there are no schedule constraints, the robot will choose the parcel based on the
percentage values. Over a period of time the robot ensures that it starts in each parcel
according to the defined proportions.
The figure below illustrates the example of when the robot starts mowing in "Parcel R".
32 Turfmow 1000 Technician's Manual
Version: Release 3.5
Last updated: 2018-12-20







































































