





























Chapter 6 How Turfmow 1000 works
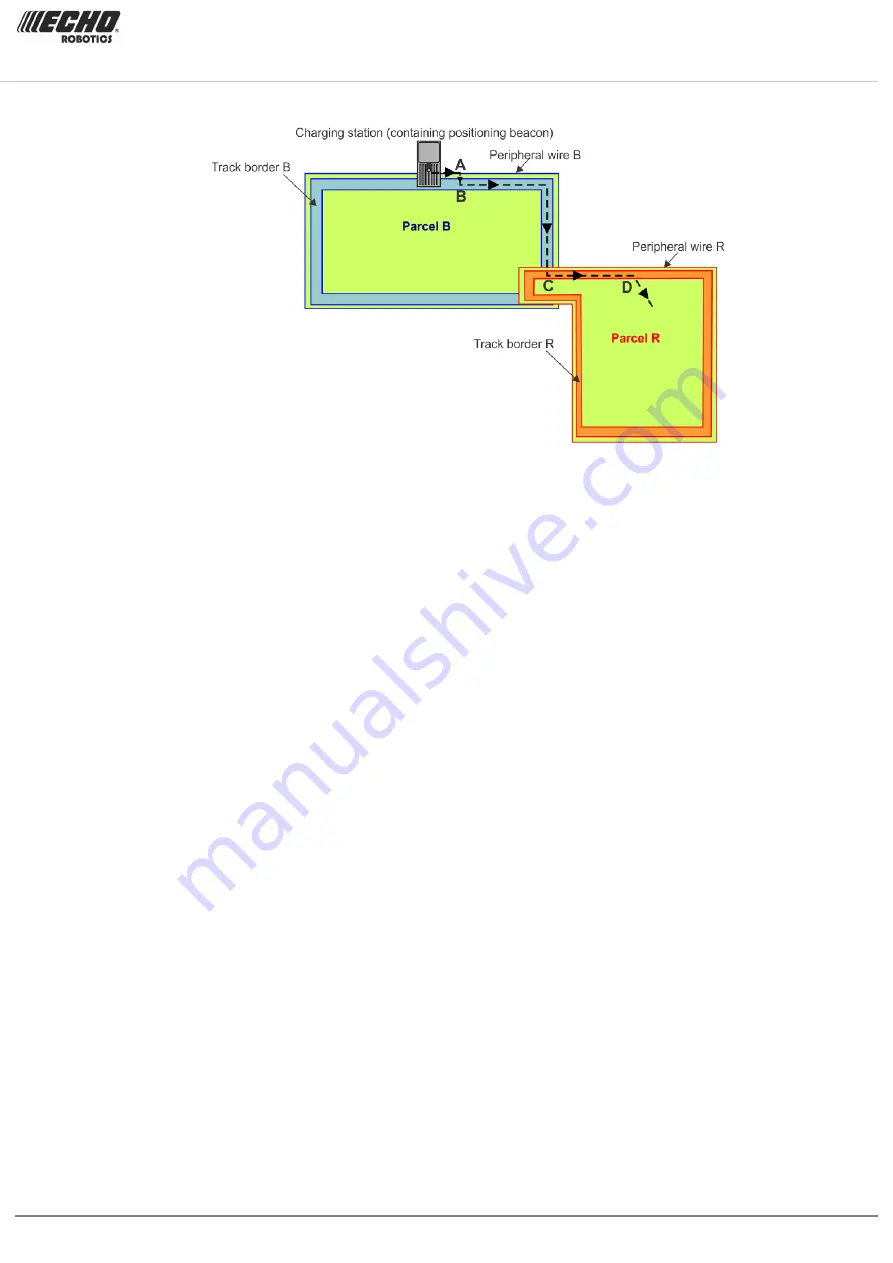
In all cases the robot will leave the station and follow the wire for a certain distance until it
reaches point A. It will then execute the loopstep and turn through a right angle and take up
its position in the track border of the first parcel (point B). These distances are specified in the
Access parameters
for the station.
It will then travel along "Track border B", until it arrives at point C, which is where the two
mowing fields overlap.
Once in "Parcel R", it will travel for a certain distance along the track border in this parcel until
it reaches point D, when it will turn into the field and start mowing.
These distances are specified in the
StartZone
parameters for the parcel.
6.1.6.3 Single mowing field with station loop
This configuration contains two wires, one defining the field to be mowed and the other
defining the
(page 201). No mowing takes place within the station loop; it is just
used to guide the robot into and out of the charging station.
Turfmow 1000 Technician's Manual
Version: Release 3.5
Last updated: 2018-12-20
33







































































