





























Chapter 6 How Turfmow 1000 works
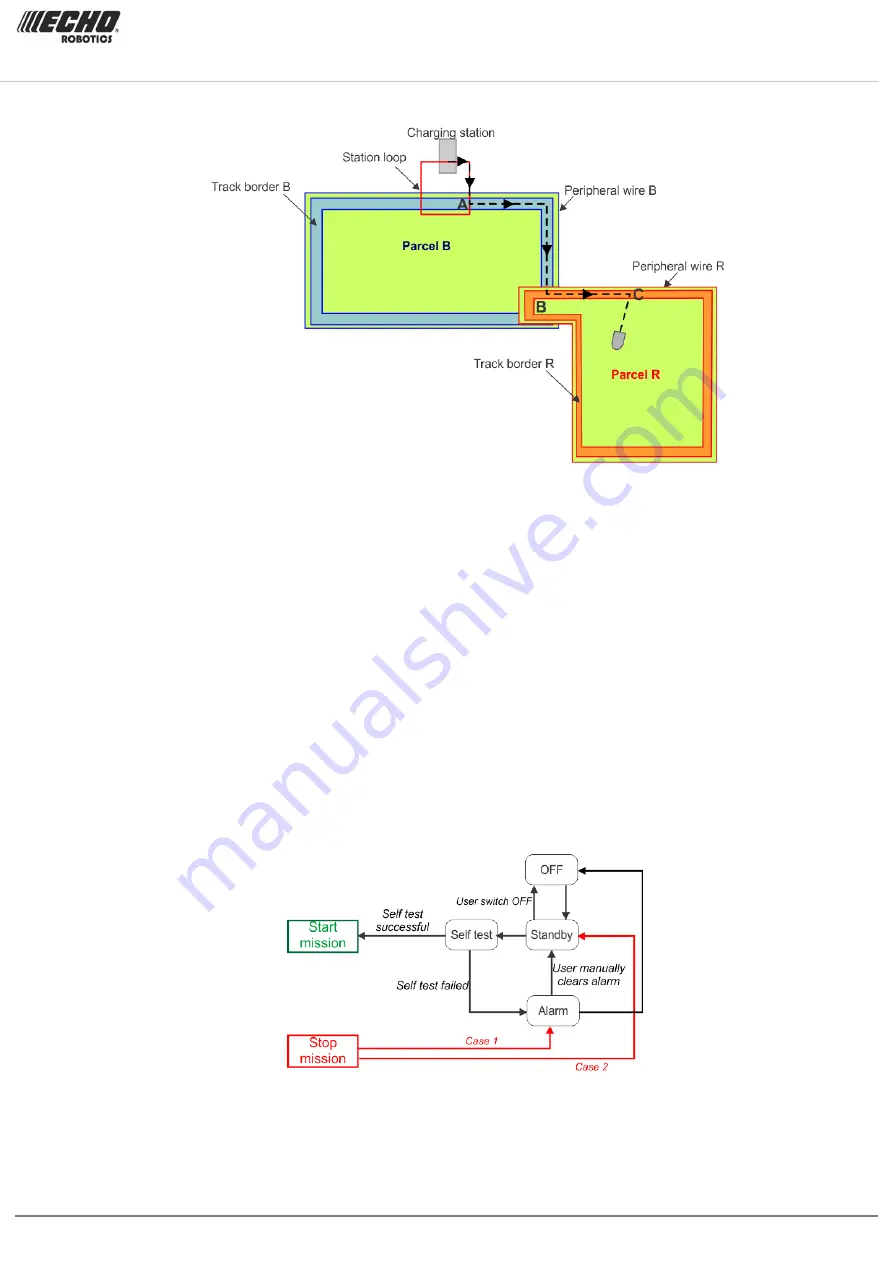
When the robot leaves the station it follows the station loop wire, until it reaches point A. This
is a pre-defined distance within the main field peripheral wire.
At this point it will turn and follow the track border of the field connected to the station loop
until it reaches point B, which is where the two mowing fields overlap.
Once in "Parcel R", it will travel for a certain distance along the track border in this parcel until
it reaches point C, when it will turn into the field and start mowing.
The distance the robot travels along the track border before starting to mow and the angle it
turns through are specified in the
StartZone
parameters for the parcel in which the mowing
starts (Parcel R in this example).
6.2 Inactive state
Some condition may arise which causes the robot to halt its autonomous mowing mission and
enter an inactive state until the active mowing mission can be resumed.
Figure 27: Inactive modes
The robot will stop operating in autonomous mode and enter the inactive state because:
•
Case 1: a problem has arisen and the robot will enter the
(page 36),
Turfmow 1000 Technician's Manual
Version: Release 3.5
Last updated: 2018-12-20
35







































































