





























Chapter 7 Installation
Wire installation good practice
Note: It is essential to use the wire supplied by Echo EU.
Begin setting up the wire from the charging station.
It is recommended to lay the main wire in a clockwise direction and the wire of an island in the
opposite (counter-clockwise) direction.
The peripheral wire cannot be crossed and cannot form loops.
7.2.1 Dealing with obstacles
Obstacles are objects that the robot must avoid. They can be detected by the
(page 18). In some cases however it is necessary to use
(page
52).
Note: The peripheral wire can be used to accommodate a maximum of 5 islands. If
there are more than 5 obstacles use pseudo-islands
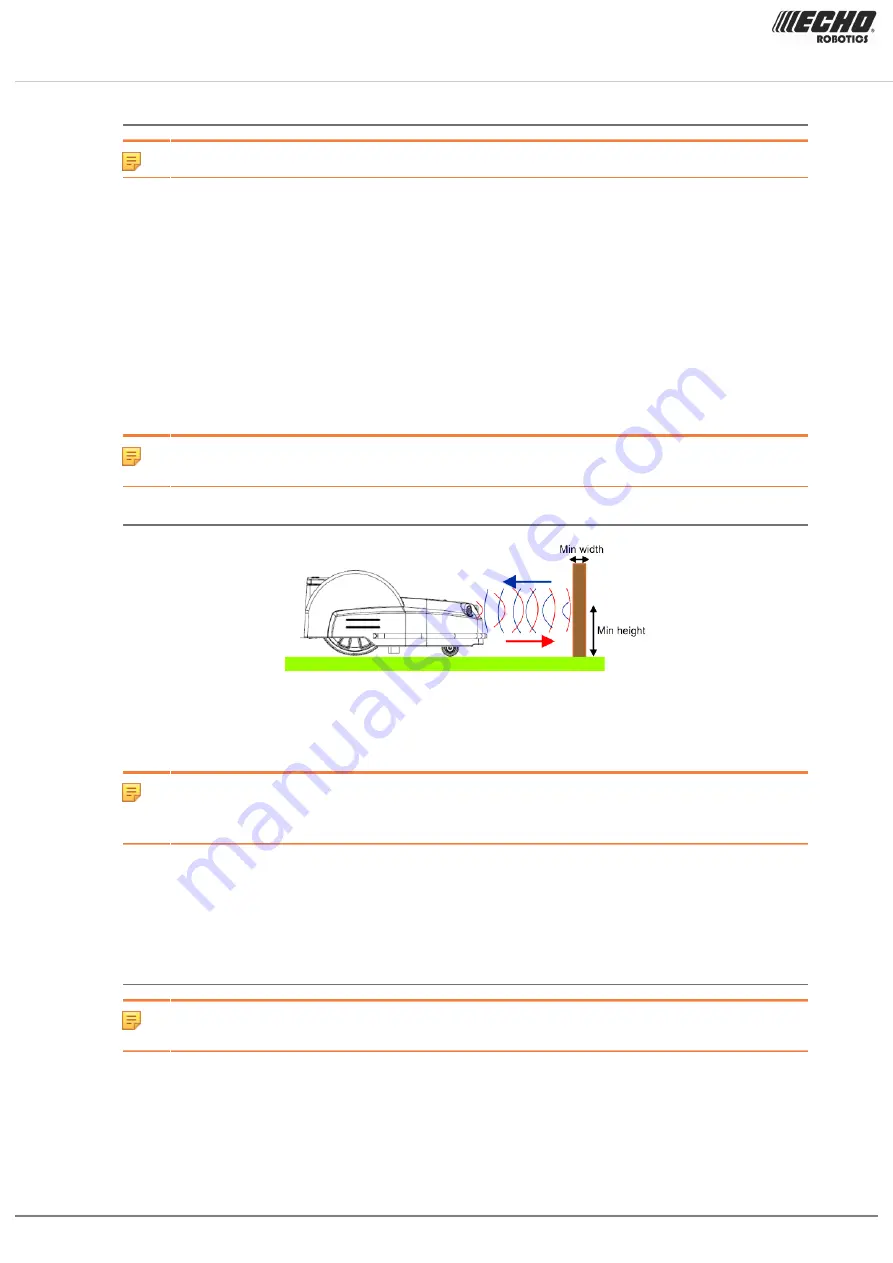
Detection of obstacles by sonar sensors
Figure 49: Detection of obstacles by sonar sensors
When the sensors detect an object, the robot slows down, moves forward until it touches the
obstacle, gently reverses and then turns through an angle to continue mowing.
Note: The detection of obstacles relies on the constant operation of all 5 sonars. If a
sonar fails an alarm is raised and the robot works at low speed after the failure of any
sonar.
The sonar sensors can only detect an object if its Min height is 400mm and its Min width
or diameter is 70mm. It may therefore be necessary to add additional protection which the
sensors can detect.
The treatment of obstacles depends on their
(page 54) and their location.
When to use islands or pseudo islands
Note: Whenever possible it is preferable to ensure that obstacles can be detected by
the sensors. (See
(page 54).)
Obstacles can also be accommodated by creating islands or pseudo islands. The method
used depends on
-
the distance between the obstacle and the charging station (1),
-
the distance between the obstacle and the peripheral wire (2),
52 Turfmow 1000 Technician's Manual
Version: Release 3.5
Last updated: 2018-12-20







































































