


















5
W
iring specifications
5-20
4. Machine harness
The following shows the wiring inside the cable carrier.
4.1 N15/N15D/N18/N18D
■
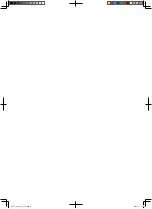
Signal cable
Signal cable
To controller
To robot
53501-AA-00
Parts
Signal
PIN
Connection
PIN
Parts
Wire
Encoder P1
S2
1
1
Resolver
0.3sq
Red
S4
2
2
White
S1
3
3
Green
S3
4
4
White
R1
5
5
Yellow
R2
6
6
White
D,G.
7
7
Drain wire Grey (Heat shrinkable tube)
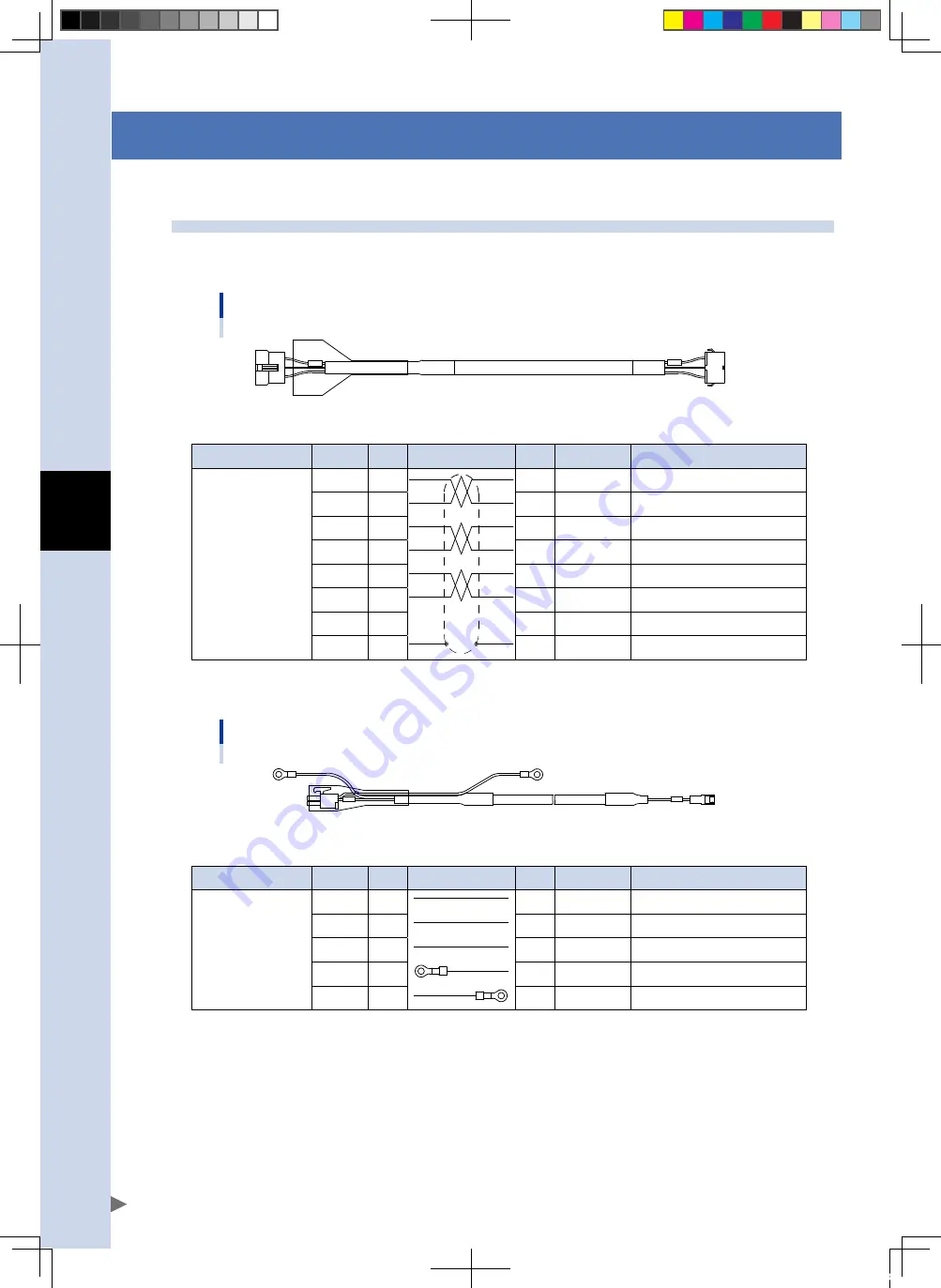
■
Power cable
Power cable
To controller
To robot
53503-AA-00
Parts
Signal
PIN
Connection
PIN
Parts
Wire
Motor wire
U
1
1
Motor
0.75sq
Red
V
2
2
White
W
3
3
Black
FG
4
Green/Yellow
FG
4
Green/Yellow
FLIP-X_maint_E_V1.50.indb 20
18/05/15 15:01
Summary of Contents for FLIP-X Series
Page 2: ...FLIP X_maint_E_V1 50 indb 2 18 05 15 15 00...
Page 40: ...FLIP X_maint_E_V1 50 indb 2 18 05 15 15 01...
Page 41: ...Chapter 1 Overview Contents 1 Overview 1 1 FLIP X_maint_E_V1 50 indb 1 18 05 15 15 01...
Page 42: ...FLIP X_maint_E_V1 50 indb 2 18 05 15 15 01...
Page 44: ...FLIP X_maint_E_V1 50 indb 2 18 05 15 15 01...
Page 46: ...FLIP X_maint_E_V1 50 indb 2 18 05 15 15 01...
Page 60: ...FLIP X_maint_E_V1 50 indb 2 18 05 15 15 01...
Page 72: ...FLIP X_maint_E_V1 50 indb 12 18 05 15 15 01...
Page 74: ...FLIP X_maint_E_V1 50 indb 2 18 05 15 15 01...
Page 104: ...FLIP X_maint_E_V1 50 indb 2 18 05 15 15 01...





























































