





























Safety Instructions
S-28
7.3 Residual risk
To ensure safe and correct use of YAMAHA robots and controllers, System integrators and/or end users imple-
ment machinery safety design that conforms to ISO12100.
Residual risks for YAMAHA robots and controllers are described in the DANGER or WARNING instructions pro-
vided in each chapter and section. Read them carefully.
7.4 Special training for industrial robot operation
Operators or persons who handle the robot for tasks such as for teaching, programming, movement checks,
inspections, adjustments, and repairs must receive appropriate training and also have the skills needed to
perform the job correctly and safely. They must also read the manual carefully to understand its contents before
attempting the robot operation or maintenance.
Tasks related to industrial robots (teaching, programming, movement check, inspection, adjustment, repair,
etc.) must be performed by qualified persons who meet requirements established by local regulations and
safety standards for industrial robots.
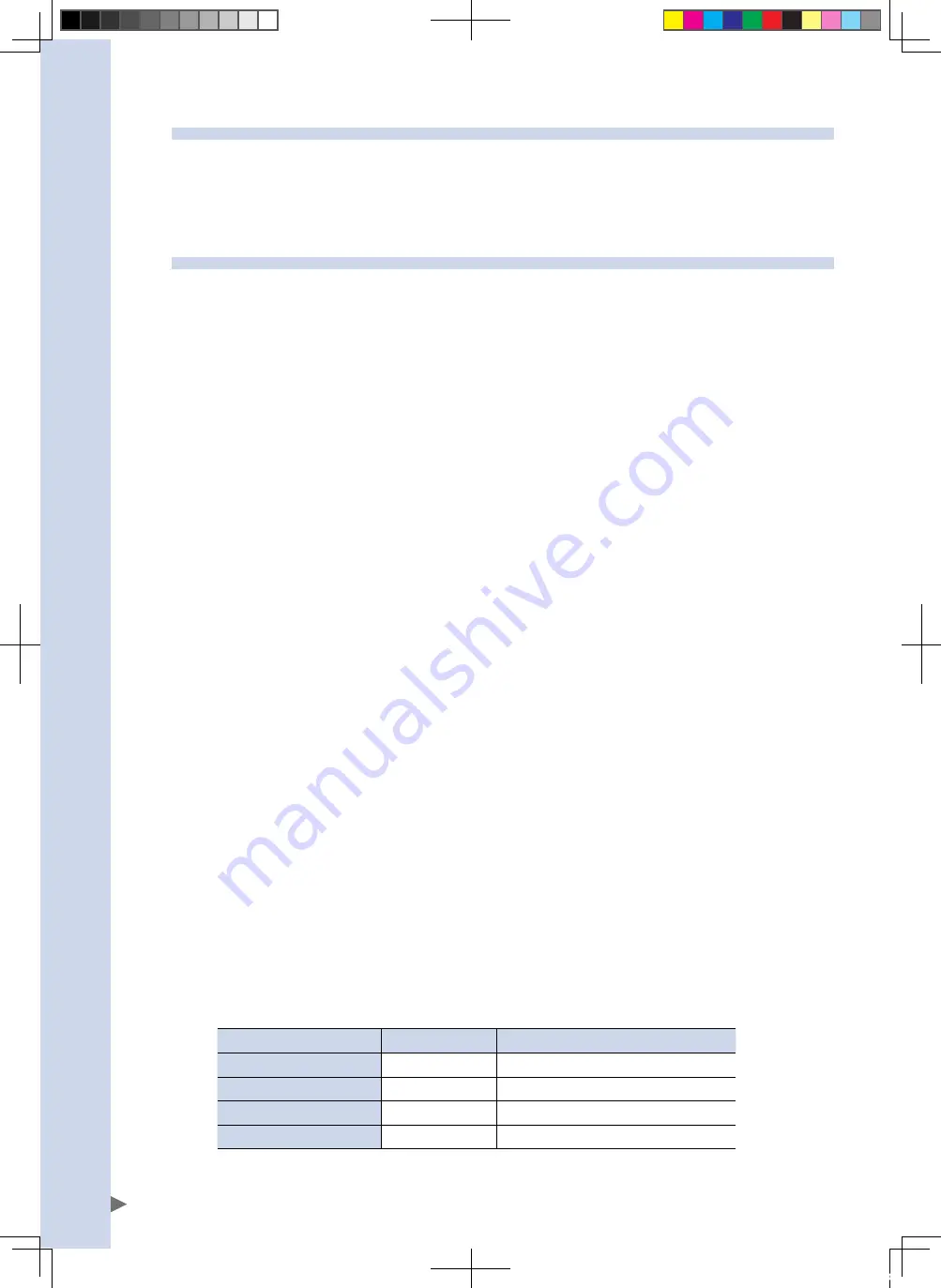
Comparison of terms used in this manual with ISO
This manual
ISO 10218-1
Note
Maximum movement range
maximum space
Area limited by mechanical stoppers.
Movement range
restricted space
Area limited by movable mechanical stoppers.
Working envelope
operational space
Area limited by software limits.
Within safety enclosure
safeguarded space
See “7.1 Movement range” in for details on the robot’s movement range.
FLIP-X_maint_E_V1.50.indb 28
18/05/15 15:01
Summary of Contents for FLIP-X Series
Page 2: ...FLIP X_maint_E_V1 50 indb 2 18 05 15 15 00...
Page 40: ...FLIP X_maint_E_V1 50 indb 2 18 05 15 15 01...
Page 41: ...Chapter 1 Overview Contents 1 Overview 1 1 FLIP X_maint_E_V1 50 indb 1 18 05 15 15 01...
Page 42: ...FLIP X_maint_E_V1 50 indb 2 18 05 15 15 01...
Page 44: ...FLIP X_maint_E_V1 50 indb 2 18 05 15 15 01...
Page 46: ...FLIP X_maint_E_V1 50 indb 2 18 05 15 15 01...
Page 60: ...FLIP X_maint_E_V1 50 indb 2 18 05 15 15 01...
Page 72: ...FLIP X_maint_E_V1 50 indb 12 18 05 15 15 01...
Page 74: ...FLIP X_maint_E_V1 50 indb 2 18 05 15 15 01...
Page 104: ...FLIP X_maint_E_V1 50 indb 2 18 05 15 15 01...






































































