






















3-9
3-8
Robot oper
ation
3
Pulse train control (SRCP, SRCP30)
3.
Pulse train control (SRCP, SRCP30)
When you control the robot movement by pulse train input, read the following description
and comply with the precautions. For detailed information on pulse train control and
specifications, refer to the separate "SRCP controller: Pulse train mode" supplementary
manual.
3.1 Acceleration/deceleration and position proportional gain
●
Acceleration/deceleration waveforms
Use sinusoidal acceleration/deceleration to issue acceleration/deceleration
instructions. Using other waveforms might adversely affect positioning accuracy and
current value stability.
●
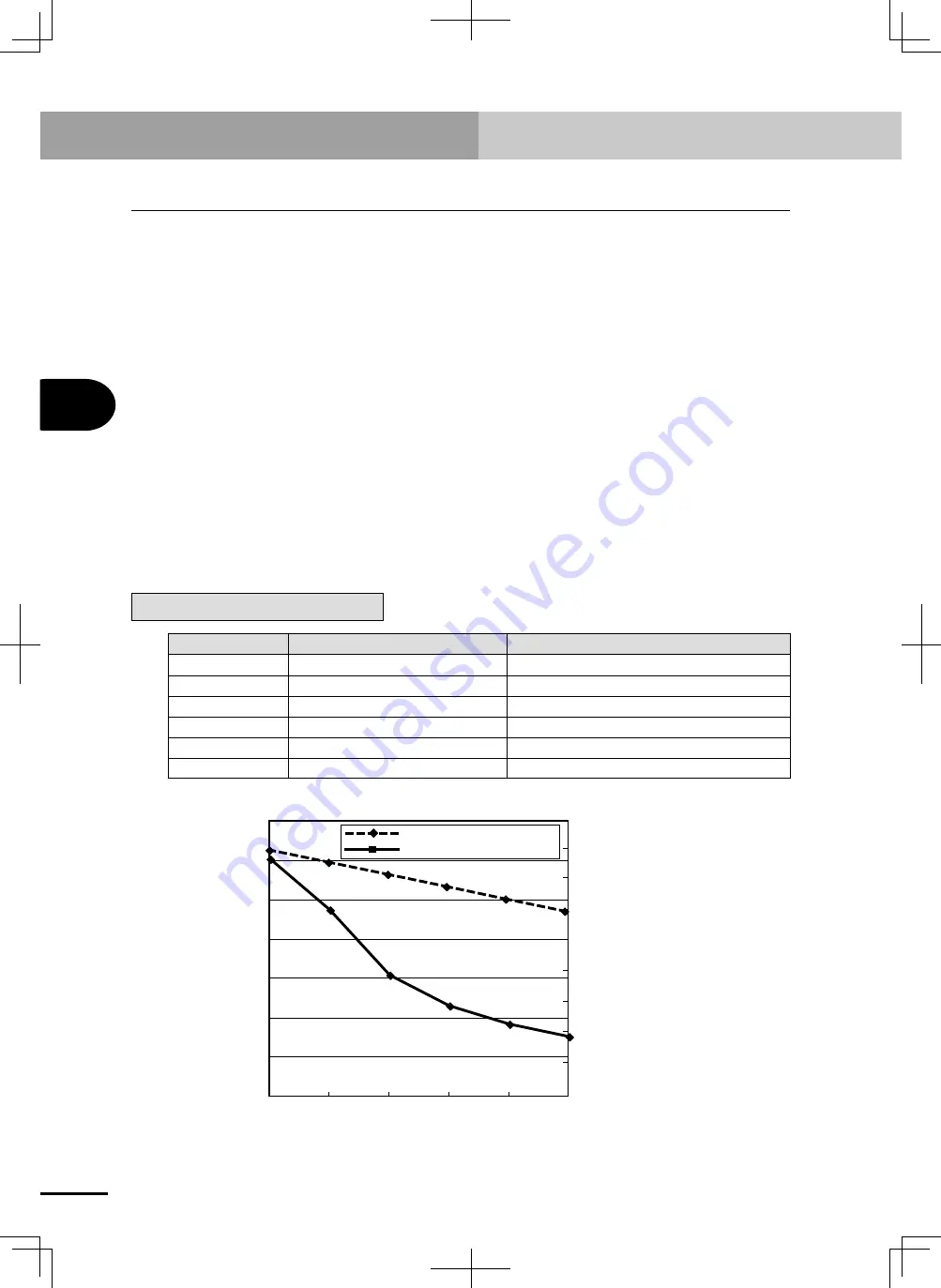
Acceleration/deceleration and position proportional gain
Acceleration/deceleration and position proportional gain at different payloads
are shown in the tables and graphs below. Select the desired parameter values by
referring to these tables and graphs.
Combination of MF50 and SRCP
Payload (kg)
Acceleration/deceleration (G)
Position proportional gain Kpp (PRM19)
0
1.20
80
10
0.94
76
20
0.61
72
30
0.45
68
40
0.36
64
50
0.30
60
Note: Acceleration/deceleration values apply to linear acceleration/deceleration.
0.00
0.20
0.40
0.60
0.80
1.00
1.20
1.40
10
0
20
30
40
50
0
10
20
30
40
50
60
70
80
90
Acceleration (G)
Position proportional gain Kpp
Payload (kg)
Acceleration/deceleration (G)
Kpp