

















6-23
6-22
6
Specifications
Robot connector (I/O signal connector)
2.
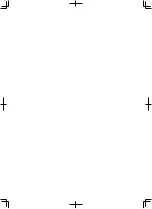
Robot connector (I/O signal connector)
Cable carrier
on robot
Hood
To robot cable
(I/O signal wires)
D.G
6
5
4
3
2
1
Z-
Z+
S+
C+
C-
7
9
F.G
+5 V
S-
0.15mm
2
twisted pair
Shield
8
6
5
4
3
2
1
7
9
8
Signal
Connection
Remarks
Pin No.
Pin No.*
Blue
Orange
Green
Brown
Gray
Red
Black
Yellow
*Internally connected
3.
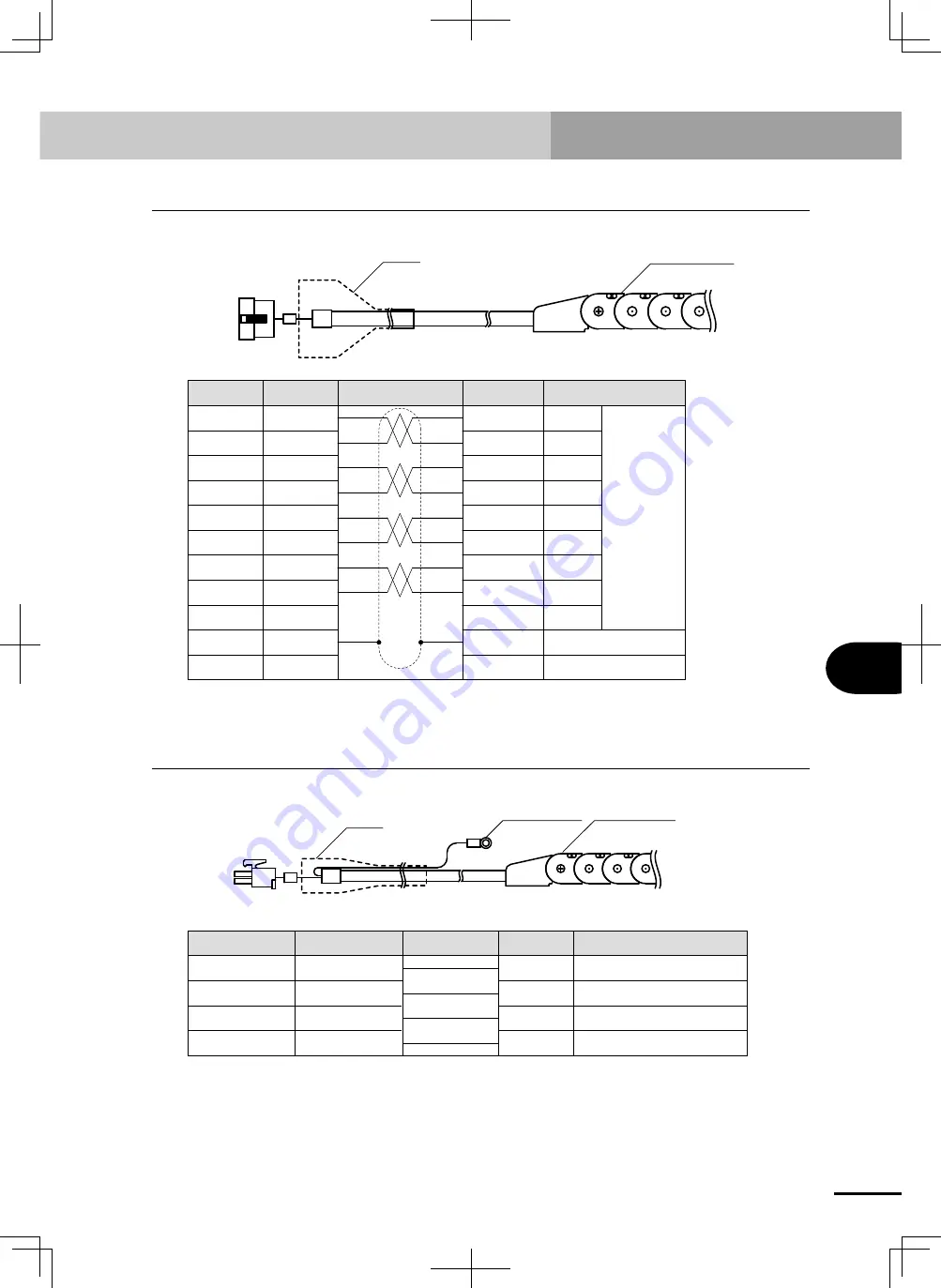
Robot connector (motor connector)
Ground wire
Cable carrier
on robot
Hood
To robot cable
(motor wires)
3
2
1
4
3
2
1
0.5 mm
2
, 0.75mm
2
Green
0.5 mm
2
, 0.75 mm
2
Red
0.5 mm
2
, 0.75 mm
2
White
0.5 mm
2
, 0.75 mm
2
Black
Signal
Pin No.
Pin No.*
Connection
Remarks
Round terminal
Motor wire FG
U
W
V
*Internally connected







































































