
























3-1
CHAPTER 3 Installation
1
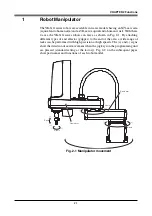
Robot Installation Conditions
1-1
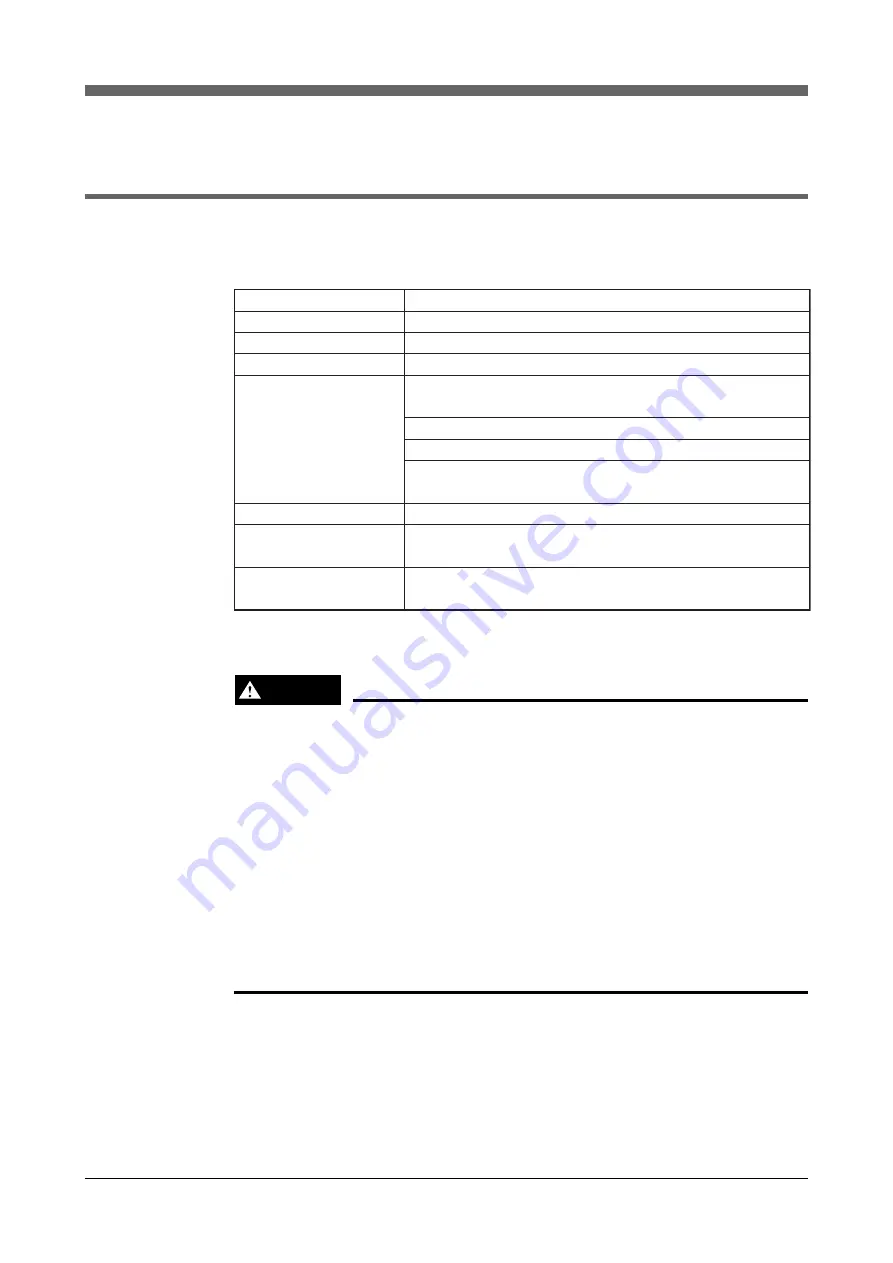
Installation environments
Be sure to install the robot in the following environments.
Setting environments
Allowable ambient temperature
Allowable ambient humidity
Altitude
Ambient environments
Vibration
Air supply pressure, etc.
Working space
Specifications
0 to 40
°
C
35 to 85% RH (non condensation)
0 to 1000 meters above sea level
Avoid installing near water, cutting water, oil, dust, metallic chips and
organic solvent.
Avoid installation near corrosive gas and corrosive materials.
Avoid installation in atmosphere containing inflammable gas, dust or liquid.
Avoid installation near objects causing electromagnetic interference,
electrostatic discharge or radio frequency interference.
Do not subject to impacts or vibrations.
Below 0.58MPa (6.0kgf/cm
2
); clean dry air not containing deteriorated
compressor oil; filtration 40
µ
m or less
Allow sufficient space margin to perform jobs (teaching, inspection,
repair, etc.)
For detailed information on how to install the robot controller, refer to the sepa-
rate "YAMAHA Robot Controller User's Manual".
WARNING
• Avoid installing the robot in locations where the ambient conditions may ex-
ceed the allowable temperature or humidity, or in environments where water,
corrosive gases, metallic powder or dust are generated. Malfunction, failure
or short circuits may otherwise result.
• This robot was not designed for operation in environments where inflamma-
ble or explosive substances are present. Do not use the robot in environ-
ments containing inflammable gas, dust or liquids. Explosions or fire could
otherwise result.
• Avoid using the robot in locations subject to electromagnetic interference,
electrostatic discharge or radio frequency interference. Malfunction may oth-
erwise occur.
• Do not use the robot in locations subject to excessive vibration. Robot instal-
lation bolts may otherwise become loose causing the manipulator to fall over.
Summary of Contents for YK-X Series
Page 1: ...User s Manual ENGLISH E YAMAHA SCARA ROBOT E35 Ver 1 08 YK XG YK X series ...
Page 2: ......
Page 6: ...MEMO ...
Page 10: ...MEMO ...
Page 12: ...MEMO ...
Page 30: ...MEMO ...
Page 36: ...MEMO ...
Page 46: ...3 10 CHAPTER 3 Installation Ground symbol M4 Ground terminal Fig 3 6 Ground terminal ...
Page 78: ...3 42 MEMO ...
Page 80: ...MEMO ...
Page 101: ...4 21 CHAPTER 4 Adjustment Cover Elongated hole Y axis origin sensor stay Bolt Fig 4 8 a ...
Page 102: ...4 22 CHAPTER 4 Adjustment Dog Hex nut Fig 4 8 b Bolt Y axis arm X axis arm Fig 4 8 c ...
Page 119: ...4 39 CHAPTER 4 Adjustment R End effector End effector Z Y X Fig 4 18 ...
Page 120: ...4 40 MEMO ...
Page 122: ...MEMO ...
Page 138: ...5 16 CHAPTER 5 Periodic Inspection M6 16 M5 16 X axis motor Base Fig 5 3 ...
Page 146: ...5 24 CHAPTER 5 Periodic Inspection M3 16 M4 18 X axis arm Fig 5 10 ...
Page 155: ...5 33 CHAPTER 5 Periodic Inspection O ring r M5 14 M6 16 R axis motor Fig 5 17 ...
Page 156: ...5 34 CHAPTER 5 Periodic Inspection M3 14 M3 16 O ring w Fig 5 18 ...
Page 161: ...CHAPTER 6 Increasing the robot operating speed 1 Increasing the robot operating speed 6 1 ...
Page 162: ...MEMO ...
Page 168: ...6 6 MEMO ...
Page 170: ...MEMO ...
Page 177: ...MEMO ...







































































