


















4-2
CHAPTER 4 Adjustment
3
Adjusting the origin
All models of the YK-XG series robots use an absolute type position detector.
The origin position (zero pulse point) can be determined by absolute reset. Once
absolute reset is performed, you do not have to repeat absolute reset when turning
the power on next time. However, absolute reset is required if any of the follow-
ing cases occur. The robot is shipped from the factory in condition "c" (below), so
please perform absolute reset after installing the robot. For more details on abso-
lute reset, refer to "Absolute Reset" in Chapter 4 of the "YAMAHA Robot Con-
troller User's Manual".
a. Absolute-related error occurred on the axis.
b. Power drop was detected in the absolute battery for the driver installed
inside the robot controller.
c. Cable connecting the robot unit to the controller was disconnected.
(This is the status when shipped from the factory.)
d. Robot generation was changed.
e. Parameters were initialized.
f. Axis parameters "Origin shift", "Origin method", "Origin direction" or
"Motor direction" were changed.
g. Motor was replaced. (Motor wiring connector was removed.)
h. Data in the ALL data file (extension: ALL) or parameter file (extension:
PRM) was written into the controller by way of the RS-232C.
The following sections explain how to perform absolute reset.
!
CAUTION
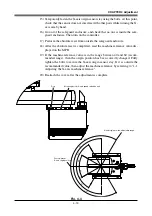
• If any of the above cases occur after installing the robot, absolute reset must
be performed again. To perform absolute reset, move the robot arms back to
their origin positions where the robot does not interfere with peripheral equip-
ment after the setup is complete.
• After performing absolute reset, move the robot to a known point to check
whether the origin position is correctly set. When doing this check, move the
robot at the slowest possible speed.
• The standard coordinate and point data must be reset when the origin posi-
tion is changed.
• Make point data setting after changing the origin position. After changing the
origin position, do not use the previous point data.
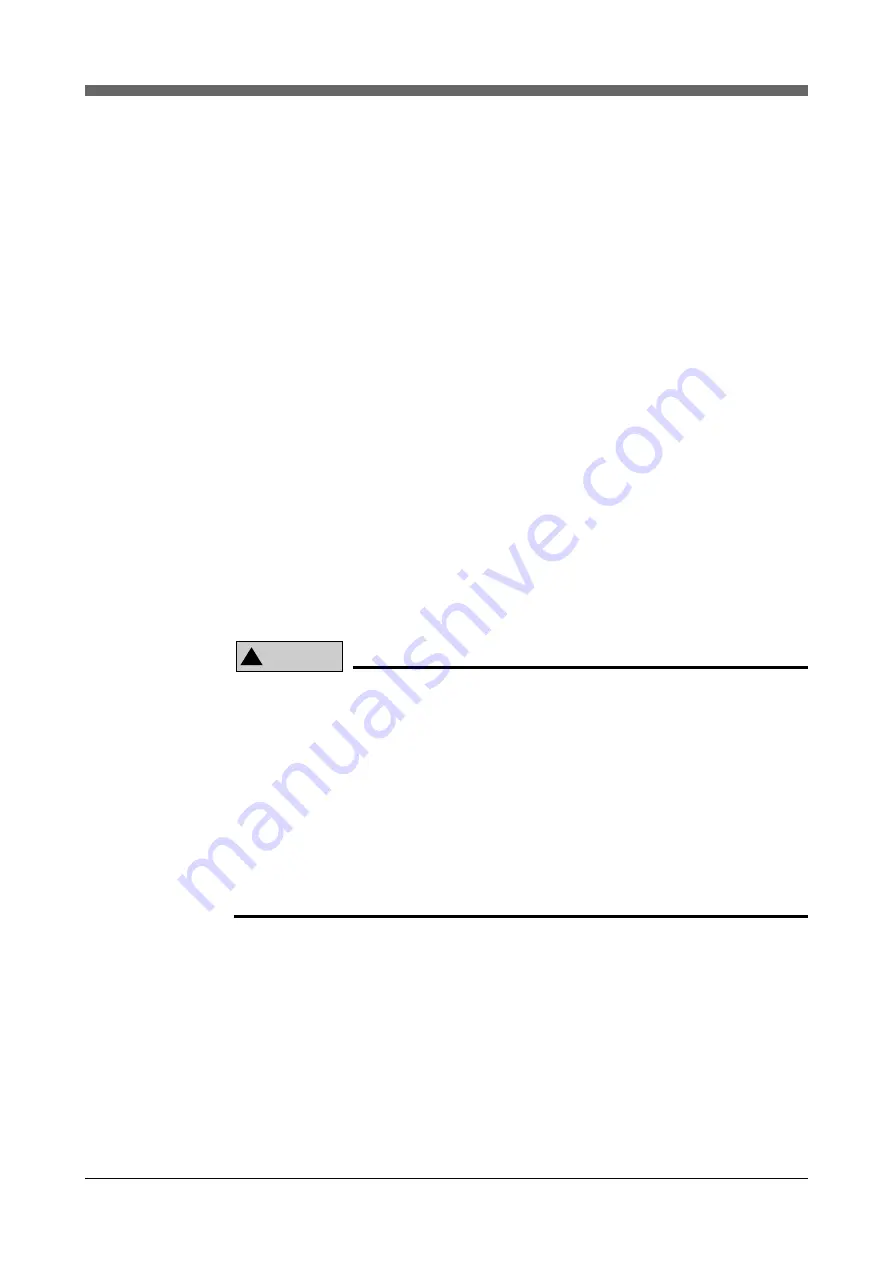
There are three absolute reset methods for the YK-XG series: the sensor method,
mark method, and stroke end method. The X-axis, Y-axis, and R-axis use the
sensor method as the initial setting, while the Z-axis uses the stroke end method.
Summary of Contents for YK-X Series
Page 1: ...User s Manual ENGLISH E YAMAHA SCARA ROBOT E35 Ver 1 08 YK XG YK X series ...
Page 2: ......
Page 6: ...MEMO ...
Page 10: ...MEMO ...
Page 12: ...MEMO ...
Page 30: ...MEMO ...
Page 36: ...MEMO ...
Page 46: ...3 10 CHAPTER 3 Installation Ground symbol M4 Ground terminal Fig 3 6 Ground terminal ...
Page 78: ...3 42 MEMO ...
Page 80: ...MEMO ...
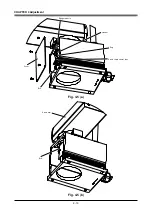
Page 101: ...4 21 CHAPTER 4 Adjustment Cover Elongated hole Y axis origin sensor stay Bolt Fig 4 8 a ...
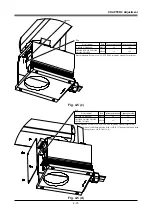
Page 102: ...4 22 CHAPTER 4 Adjustment Dog Hex nut Fig 4 8 b Bolt Y axis arm X axis arm Fig 4 8 c ...
Page 119: ...4 39 CHAPTER 4 Adjustment R End effector End effector Z Y X Fig 4 18 ...
Page 120: ...4 40 MEMO ...
Page 122: ...MEMO ...
Page 138: ...5 16 CHAPTER 5 Periodic Inspection M6 16 M5 16 X axis motor Base Fig 5 3 ...
Page 146: ...5 24 CHAPTER 5 Periodic Inspection M3 16 M4 18 X axis arm Fig 5 10 ...
Page 155: ...5 33 CHAPTER 5 Periodic Inspection O ring r M5 14 M6 16 R axis motor Fig 5 17 ...
Page 156: ...5 34 CHAPTER 5 Periodic Inspection M3 14 M3 16 O ring w Fig 5 18 ...
Page 161: ...CHAPTER 6 Increasing the robot operating speed 1 Increasing the robot operating speed 6 1 ...
Page 162: ...MEMO ...
Page 168: ...6 6 MEMO ...
Page 170: ...MEMO ...
Page 177: ...MEMO ...







































































