





























Summary of Contents for CACR-HR BAB Series
Page 41: ... 39 ...
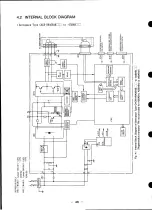
Page 48: ...4 2 INTERNAL BLOCK DIAGRAM Servopack Type CACR HRA5BAB 2 to 05BABE L 46 ...
Page 49: ... Servopack Type CACR HRIOBAB 15BAB 47 ...
Page 50: ... 48 ...
Page 76: ... 74 ...
Page 77: ... 75 ...
Page 78: ... 76 ...







































































