





























User Parameter Tables
5-
13
* The setting range is 1 or 2 for flux vector control and open-loop vector control 2.
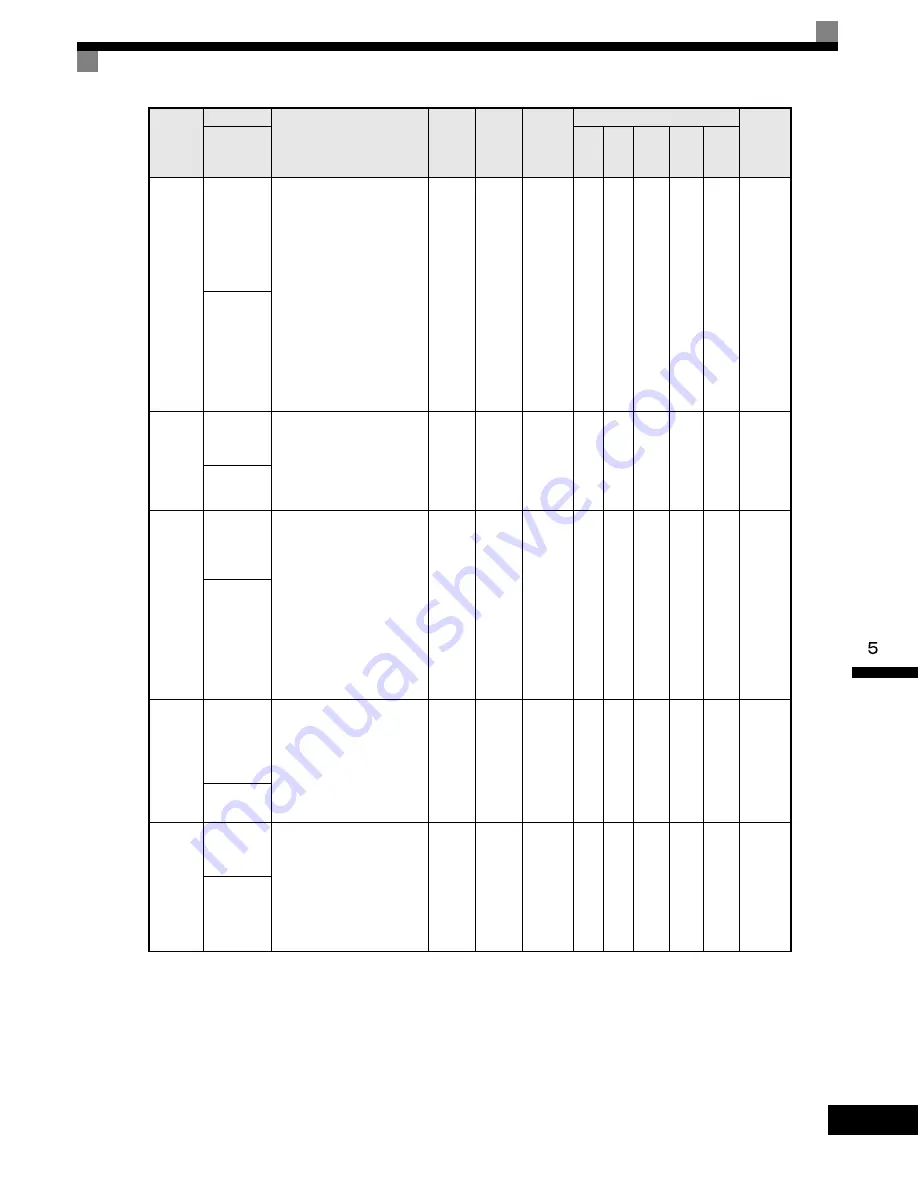
b1-05
Minimum
Output
Frequency
(E1-09) or
Less
Operation
Selection
Used to set the method of
operation when the
frequency reference input is
less than the minimum output
frequency (E1-09).
0: Run at frequency reference
(E1-09 not effective).
1: STOP (Frequencies below
E1-09 in the coast to stop
state.)
2: Run at min. frequency.
(E1-09)
3: Run at zero speed
(Frequencies below E1-09
are zero)
0 to 3
0
No
No
No
No
A
No
184H
Zero-Speed
Oper
b1-06
Digital
Input Scan
Time
Sets the scan rate of digital
input terminals.
0: 2ms - 2 scans (for quick
response)
1: 5ms - 2 scans (for noisy
environments)
0 or 1
1
No
A
A
A
A
A
185H
Cntl Input
Scans
b1-07
Local/
Remote
Run
Selection
0: Cycle External RUN - If
the run command is closed
when switching from local
mode to remote mode, the
Drive will not run.
1: Accept External RUN - If
the run command is closed
when switching from local
mode to remote mode, the
Drive WILL run. (same as
setting "0" except drive
will not run)
0 or 1
0
No
A
A
A
A
A
186H
LOC/REM
RUN Sel
b1-08
Run
Command
Selection
During
Program
0: Disabled - Run command
accepted only in the
operation menu.
1: Enabled - Run command
accepted in all menus
(except when b1-02 = 0).
0 or 1
0
No
A
A
A
A
A
187H
RUN CMD
at PRG
b1-10
Zero-speed
Operation
Selection
0: Disabled.
1: Enabled.
Should be enabled when using
devices that require motor
speed reference as well as both
forward and reverse rotation.
Allows for more stability
related controls at zero speed.
0 or 1
0
No
No
No
No
No
A
1DEH
ModeSel
@ZeroSpd
Parameter
Number
Name
Description
Setting
Range
Factory
Setting
Change
during
Operation
Control Methods
MODBUS
Register
Display
V/f
V/f
with
PG
Open
Loop
Vector
1
Flux
Vector
Open
Loop
Vector
2
Summary of Contents for CIMR-G7U
Page 2: ......
Page 7: ...v...
Page 32: ...1 18...
Page 90: ...3 16...
Page 112: ...4 22...
Page 382: ...6 164...
Page 410: ...7 28...
Page 454: ......
Page 455: ......







































































