





























Individual Functions
6-
135
Setting Precautions
•
Droop control is disabled if b7-01 is set to 0.0.
•
Set b7-01 to the amount of slip as the percentage of slip when the maximum output frequency is input and
the rated torque is generated.
•
Parameter b7-02 is used to adjust the responsiveness of droop control. Increase this setting if oscillation or
hunting occur.
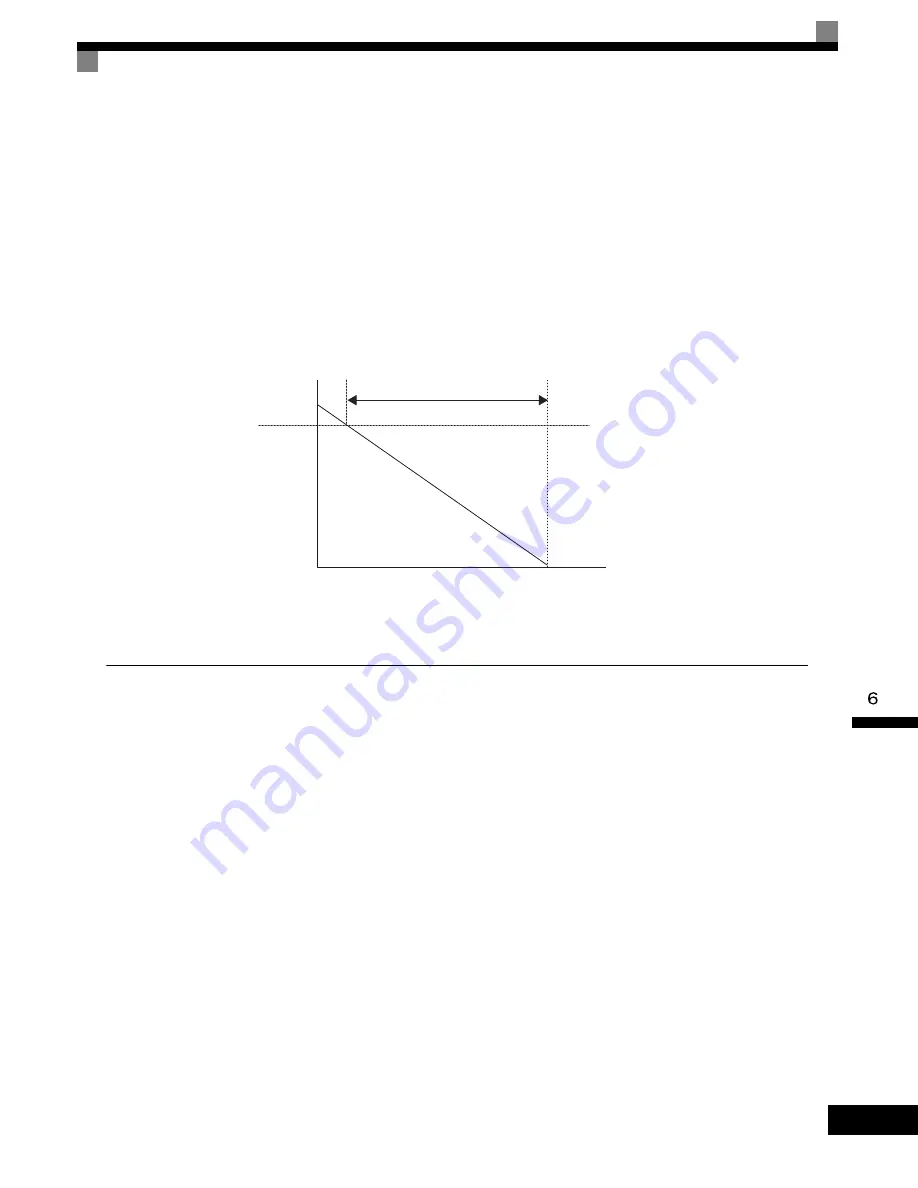
Setting the Droop Control Gain
Set the droop control gain as the speed reduction at a 100% motor torque, as a percentage of the maximum
output frequency.
Fig 6.73 Droop Control Gain
Zero-servo Function
The zero-servo function holds the motor when the motor is stopped in what is call a zero-servo status. This
function can be used to stop the motor even with an external force acts on the motor or the analog reference
input is offset.
The zero-servo function is enabled when one of the multi-function inputs (H1-01 to H1-10) is set to 72 (zero
servo command). If the zero servo command is ON when the frequency (speed) reference falls below the zero
speed level, a zero-servo status is implemented.
Torque
Speed
Speed reference
0
100%
b7-01
Summary of Contents for CIMR-G7U
Page 2: ......
Page 7: ...v...
Page 32: ...1 18...
Page 90: ...3 16...
Page 112: ...4 22...
Page 382: ...6 164...
Page 410: ...7 28...
Page 454: ......
Page 455: ......







































































