





























3 Startup Procedure and Test Run
YASKAWA ELECTRIC
SIEP C710617 19A YASKAWA AC Drive CR700 Technical Manual
221
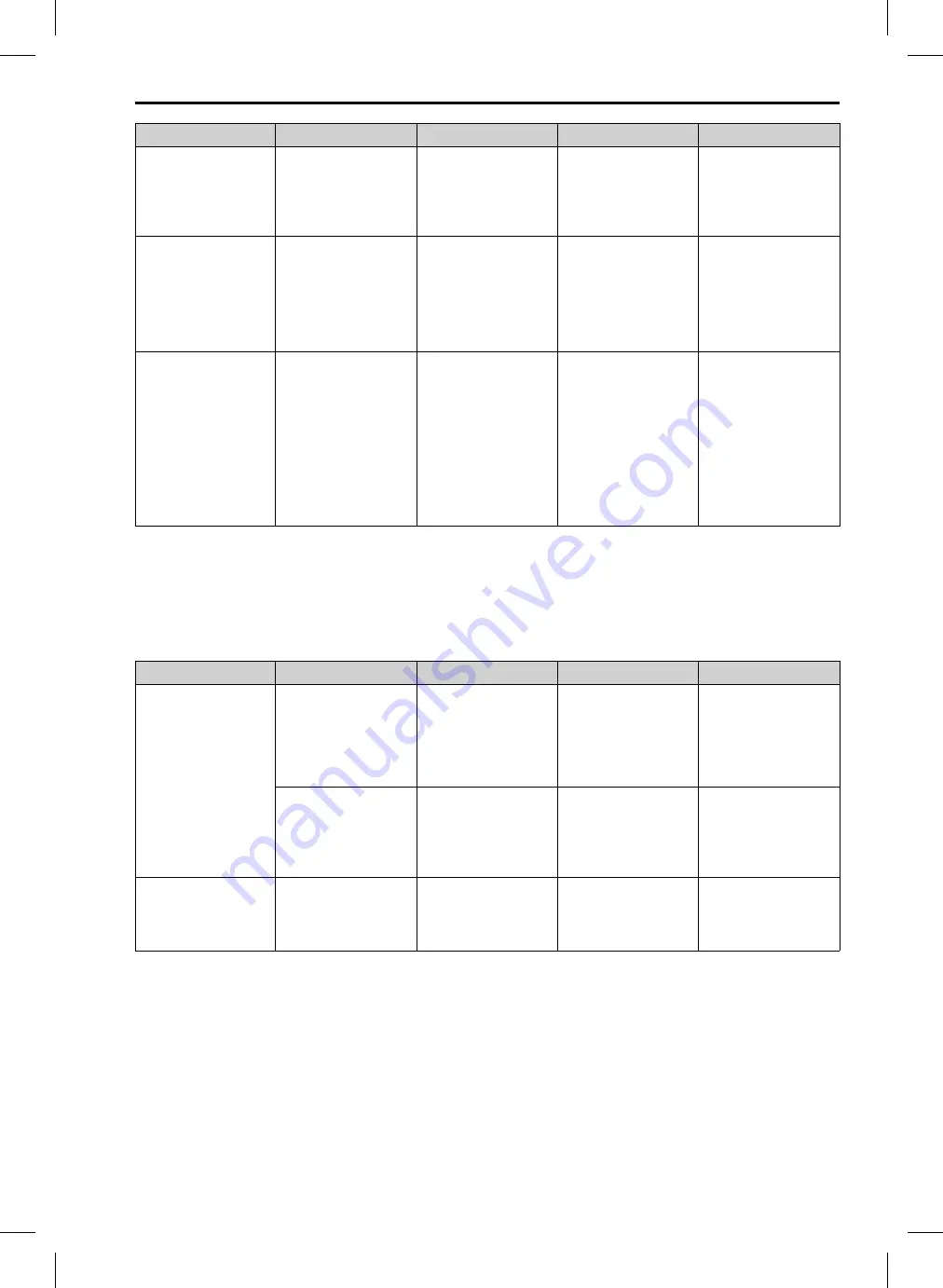
Problem
Parameter Number
Solution
Default
Recommended Value
Speed accuracy is poor.
C3-01 [Slip
Compensation Gain]
•
Increase setting value in
increments of 0.1 if
speed is slow.
•
Decrease setting value
in increments of 0.1 if
speed is fast.
1.0
0.5 - 1.5
•
The motor excitation
sound is significant.
•
Hunting, oscillation at
low speeds (10 Hz or
lower)
C6-02 [Carrier Frequency
Selection]
•
Increase the carrier
frequency if the motor
excitation sound is
significant.
•
Decrease the carrier
frequency if hunting or
oscillation occurs at
low speeds.
1 (2 kHz)
0 to upper limit value
•
Insufficient torque at
low speeds.
•
Speed response is slow.
•
Significant shock upon
drive startup.
•
E1-08 [Mid Point A
Voltage]
•
E1-10 [Minimum
Output Voltage]
•
Increase setting value
when torque, speed
response is slow.
•
Decrease setting value
if there is marked shock
upon drive startup.
Note:
If the setting value is
set too high, a large
torque reference may
be output even with
light loads.
•
E1-08: 11.0
•
E1-10: 2.0
Default setting ±2 V
*1
Differs depending on settings for
A1-02 [Control Method Selection]
and
o2-04 [Drive Model (KVA) Selection]
, when at default
settings.
*2
Differs depending on settings for
A1-02 [Control Method Selection]
and
E1-03 [V/f Pattern Selection]
, when at default settings.
*3
Differs depending on setting for
o2-04 [Drive Model (KVA) Selection]
, when at default settings.
*4
Suggested settings are for 200 V class drives. Double the value for 400 V class drives.
■
Closed Loop Vector Control
Table 3.31 Parameters for Fine Tuning the Drive (CLV Control)
Problem
Parameter Number
Solution
Default
Recommended Value
•
Torque, speed response
is slow.
•
Hunting, oscillation
•
High speed
C5-01 [ASR
Proportional Gain 1]
•
Low speed
C5-03 [ASR
Proportional Gain 2]
•
Increase setting value in
increments of 5.00
when torque, speed
response is slow.
•
If hunting, oscillation
occurs, decrease the
setting value.
20.00
10.00 - 50.00
•
High speed
C5-02 [ASR Integral
Time 1]
•
Low speed
C5-04 [ASR Integral
Time 2]
•
Decrease setting value
when torque, speed
response is slow.
•
If hunting, oscillation
occurs, increase the
setting value.
0.500 s
0.300 s - 1.000 s
ASR proportional gain or
integral time cannot be
established for low speed
or high speed.
C5-07 [ASR Gain
Switchover Frequency]
Change the ASR
proportional gain and
ASR integral time in
accordance with the
output frequency.
0.0 Hz
0.0 Hz to maximum
output frequency







































































