











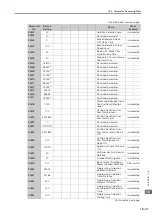


















16.3 Parameter Recording Table
16-39
16
Parameter Lists
PnB0E
0000h
/S-ON
After restart
PnB0F
0000h
P-OT
After restart
PnB10
0000h
N-OT
After restart
PnB11
0000h
/DEC
After restart
PnB12
0000h
/RGRT
After restart
PnB13
0000h
/INPOSITION
After restart
PnB14
0000h
/POUT0
After restart
PnB15
0000h
/POUT1
After restart
PnB16
0000h
/POUT2
After restart
PnB17
0000h
/POUT3
After restart
PnB18
0000h
/POUT4
After restart
PnB19
0000h
/POUT5
After restart
PnB1A
0000h
/POUT6
After restart
PnB1B
0000h
/POUT7
After restart
PnB1C
0000h
/WARN
After restart
PnB1D
0000h
/BK
After restart
PnB1E
0000h
/S-RDY
After restart
PnB1F
0000h
Overtravel (OT) Stop
Method
After restart
PnB20
0000h
Moving Mode
After restart
PnB21
+99999999
•
Linear coordinates
(PnB20 = 0000h): For-
ward Software Limit (P-
LS)
•
Rotational coordinates
(PnB20 ≠ 0000h): Last
Rotational Coordinate
After restart
PnB23
-99999999
•
Linear coordinates
(PnB20 = 0000h):
Reverse Software Limit
(N-LS)
•
Rotational coordinates
(PnB20 ≠ 0000h): First
Rotational Coordinate
After restart
PnB25
0
•
When using an incremen-
tal encoder: Origin
•
When using an absolute
encoder: Absolute
Encoder Offset
After restart
PnB27
1000
Positioning/Registration
Speed
After restart
PnB29
1000
Acceleration rate
Immediately
PnB2B
1000
Deceleration rate
Immediately
PnB2D
1
/INPOSITION Width
Immediately
PnB2F
1
/NEAR Width
Immediately
PnB31
0000h
Homing Method
After restart
PnB32
0000h
Homing Direction
Immediately
PnB33
1000
Homing Moving Speed
Immediately
PnB35
1000
Homing Approach Speed
Immediately
PnB37
1000
Homing Creep Speed
Immediately
PnB39
0
Homing Final Move Dis-
tance
Immediately
PnB3B to
PnB4D
0
Reserved parameters
–
Continued on next page.
Continued from previous page.
Parameter
No.
Default
Setting
Name
When
Enabled







































































