





























Communications D - 3
Using Modbus Communication
Serial communication can be performed with Direct Digital Controllers (DDCs) or similar devices using the Modbus protocol.
Modbus Communication Configuration
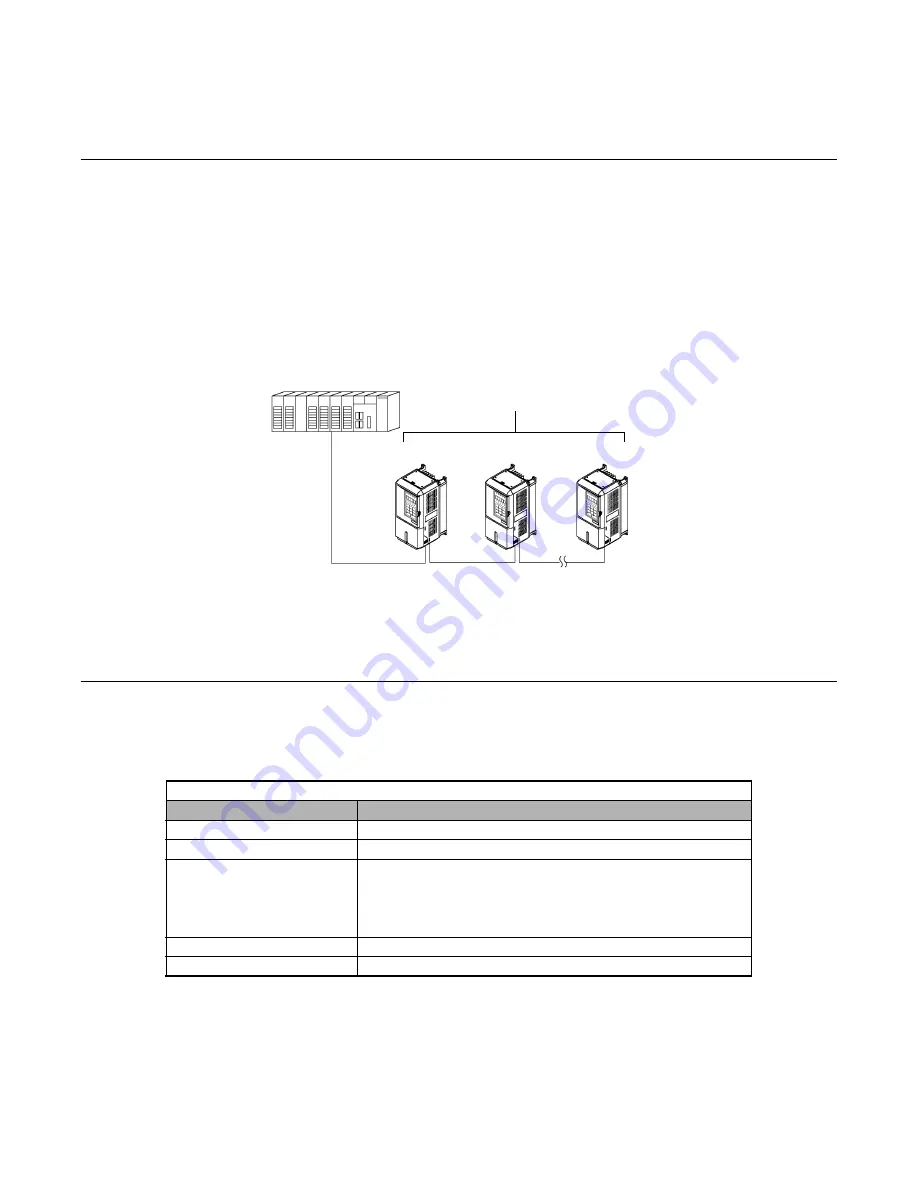
Modbus communication is configured using 1 master (PLC) and a maximum of 31 slaves. Serial communication between
master and slave is normally initiated by the master and responded to by the slaves.
The master performs serial communication with one slave at a time. Consequently, the slave address of each slave must be
initially set, so that the master can perform serial communication using that address. Slaves receiving commands from the
master perform the specified functions, and send a response back to the master.
Fig D. 1 Example of Connections between Master and Drive
Communication Specifications
The Modbus communication specifications are shown below:
Table D.1 Modbus Communication Specifications
Item
Specifications
Interface
RS-422, RS-485
Communications Cycle
Asynchronous (Start-stop synchronization)
Communications Parameters
Baud rate:
Select from 1200, 2400, 4800, 9600, and 19200 bps.
Data length:
8 bits fixed
Parity:
Select from even, odd, or none.
Stop bits:
1 bit selected
Communications Protocol
Modbus
Number of Connectable Units
31 units max.
Master
E7
E7
E7
Slaves
Summary of Contents for E7LBA002
Page 1: ...E7L Drive Bypass Technical Manual Model E7L Document Number TM E7L 01 ...
Page 8: ...Introduction vi Notes ...
Page 12: ...Table of Contents x Notes ...
Page 54: ...Electrical Installation 2 22 Wiring Diagram ...
Page 55: ...Electrical Installation 2 23 ...
Page 87: ...Start Up and Operation 4 9 Notes ...
Page 202: ...Diagnostic Troubleshooting 6 30 Notes ...
Page 248: ...Capacity Related Parameters B 6 Notes ...
Page 279: ...Communications D 27 Note ...
Page 280: ...Communications D 28 ...
Page 292: ...Spare Parts F 6 ...
Page 304: ...Index 12 ...
Page 305: ......







































































