





























Internal cables and compressed air lines
8
-
45
NOTICE
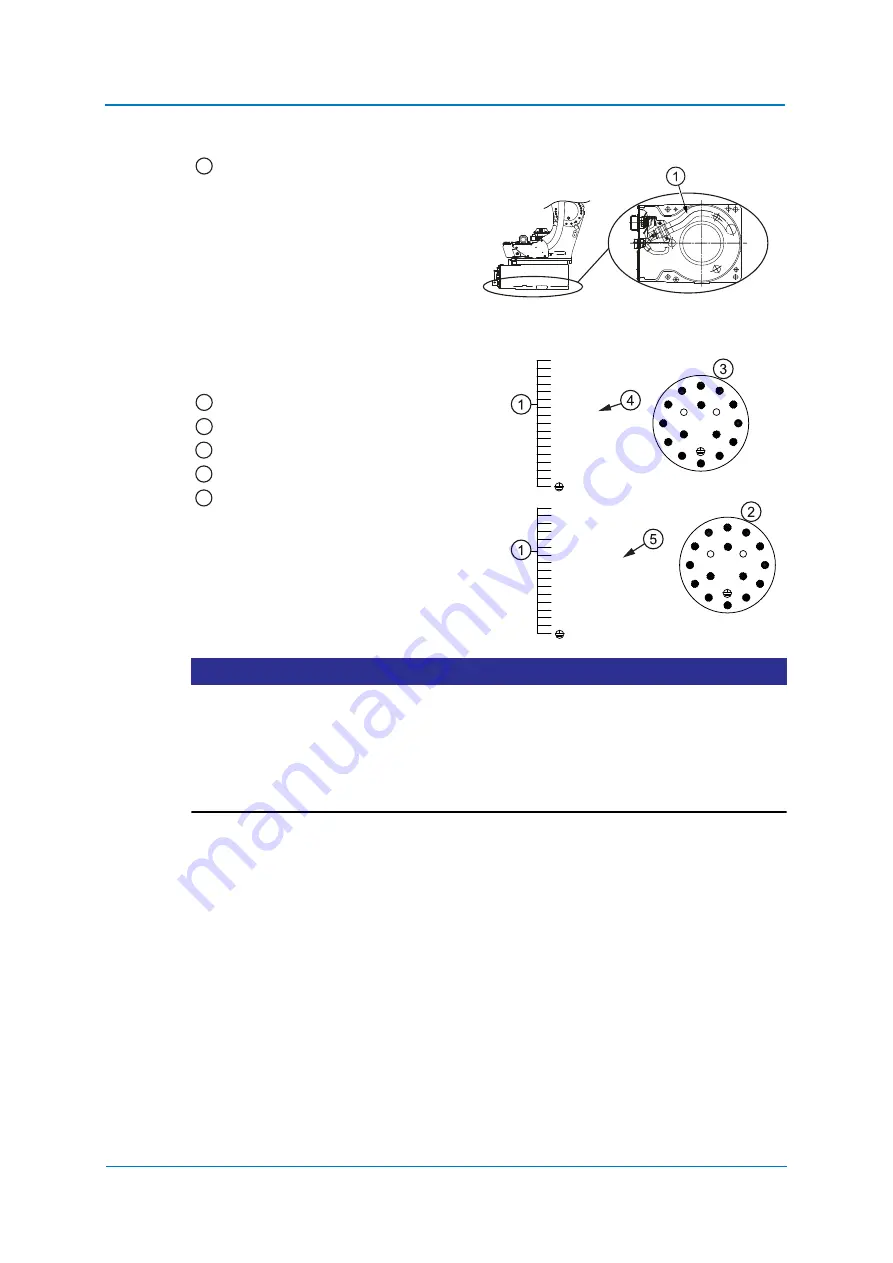
For the standard specification, the pins No.7 and No.8 of 3BC connector on the U-arm
are respectively connected with the shock sensor power supply and shock sensor
signal input port of the A10 controller.
The pins No.7 and No.8 on both the connector base side and the U-arm side of the
connector for internal user I/O wiring harness are not connected.
For wiring, refer to fig. (a) “Internal Connection Diagram A10)”.
The internal connections of the robot are shown in the following diagrams "Connection
diagram A" and "Connection diagram B".
Mating connector for internal wiring harness (Option)
The mating connector for internal wiring harness is optional.For the mating connector for
internal wiring harness, two different types of the end bell are prepared depending on the
form: Straight type and Elbow type
Straight type
The appearance of the robot with the connector installed is shown in figure Mating
connector for internal user I/O wiring harness (straight type)”. When the connector with the
straight type of end bell is installed, the connector of the U-arm part sticks out to the back
of the robot. Thus, the operating range of the U-axis must be limited.
Wire harness location
Wire harness
Detailed drawing of connector
● = used
○ = not used
Pins used
Detailed drawing connector on casing
Detailed drawing connector on base
Open
Shock sensor signal input
1
(1.25 mm
2
)
(1.25 mm
2
)
(1.25 mm
2
)
(1.25 mm
2
)
(0.75 mm
2
)
(0.2 mm
2
)
(0.2 mm
2
)
(0.2 mm
2
)
(0.2 mm
2
)
(0.2 mm
2
)
(0.2 mm
2
)
(0.2 mm
2
)
(0.2 mm
2
)
(0.2 mm
2
)
(0.2 mm
2
)
(0.2 mm
2
)
(0.2 mm
2
)
(0.2 mm
2
)
(0.2 mm
2
)
(0.2 mm
2
)
(0.2 mm
2
)
(0.75 mm
2
)
(1.25 mm
2
)
(1.25 mm
2
)
(1.25 mm
2
)
(1.25 mm
2
)
(0.75 mm
2
)
(0.75 mm
2
)
11
13
12
14
15
16
13
16
14
15
10
12
11
5
9
6
1
3
4
2
4
6
10
1
8
3
5
7
2
9
12
13
11
14
15
16
14
15
13
16
10
12
11
5
9
6
1
3
4
2
6
4
9
1
7
2
5
8
3
10
8
7
8
7
㸦
Open
㸧
㸦
Open
㸧
(Shock sensor signal input)
㸩
24V
㸦
1A
㸧
1
2
3
4
5
Summary of Contents for GP25-12
Page 1: ...ROBOTICS YYR 1 06VXH25 A10 GP25 12 Standard Operating and Maintenance Manual...
Page 51: ...Maintenance and inspection 9 51 Fig 9 2 Inspection intervals...
Page 56: ...Maintenance and inspection 9 56 9 3 Wrist unit Sealing part U arm Cover Gasket U arm 1 2 3...
Page 77: ...Parts lists 11 77...







































































