





























6.12 Troubleshooting Without Fault Display
524
YASKAWA
SIEPYAIH6B01A HV600 AC Drive Bypass Technical Reference
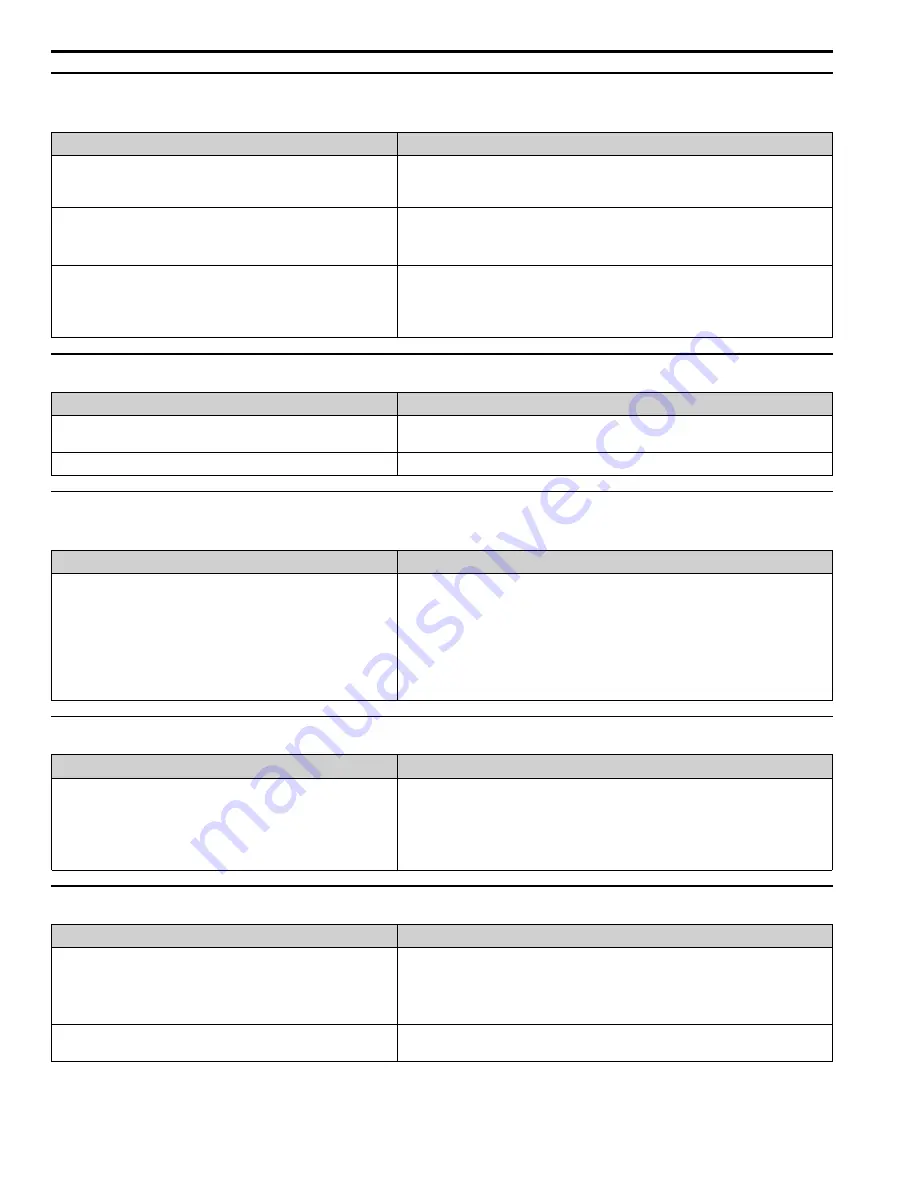
◆
The Drive Frequency Reference Is Different than the Controller Frequency
Reference Command
Causes
Possible Solutions
The analog input gain and bias for the frequency reference input are set
incorrectly.
Examine the gain and bias settings for the analog inputs that set the frequency reference.
•
Terminal A1:
H3-03 [Terminal A1 Gain Setting]
,
H3-04 [Terminal A1 Bias Setting]
•
Terminal A2:
H3-11 [Terminal A2 Gain Setting]
,
H3-12 [Terminal A2 Bias Setting]
The drive is receiving frequency bias signals from analog input terminals A1
and A2 and the sum of all signals makes the frequency reference.
•
Examine parameters
H3-02, H3-10 [MFAI Function Selection]
. If two or more of these
parameters are set to
0 [Frequency Reference]
, change the settings.
•
Use
U1-13 and U1-14 [Terminal A1, A2 Input Voltage]
to make sure that the analog input values
set to terminals A1 and A2 are applicable.
PID control is enabled.
If PID control is not necessary, set
b5-01 = 0 [PID Mode Setting = Disabled]
.
Note:
When PID control is enabled, the drive adjusts the output frequency as specified by the target
value. The drive will only accelerate to the maximum output frequency set in
E1-04 [Maximum
Output Frequency]
while PID control is active.
◆
There Is Too Much Motor Oscillation and the Rotation Is Irregular
Causes
Possible Solutions
Unsatisfactory balance of motor phases.
•
Make sure that the drive input power voltage supplies stable power.
•
Set
L8-05 = 0 [Input Phase Loss Protect Select = Disabled]
.
The motor is hunting.
Set
n1-01 = 1 [Hunting Prevention Selection = Enabled]
.
◆
There Is Audible Noise from the Drive or Motor Cables When the Drive Is
Energized
Causes
Possible Solutions
The relay switching in the drive is making too much noise.
•
Use
C6-02 [Carrier Frequency Selection]
to decrease the carrier frequency.
•
Connect a noise filter to the input side of the drive power supply.
•
Connect a noise filter to the output side of the drive.
•
Isolate the control circuit wiring from the main circuit wiring.
•
Use a metal cable gland to wire the drive.
•
Shield the periphery of the drive with metal.
•
Make sure that the drive and motor are grounded correctly.
•
Make sure that ground faults have not occurred in the wiring or motor.
◆
The Ground Fault Circuit Interrupter (GFCI) Trips During Run
Causes
Possible Solutions
There is too much leakage current from the drive.
•
Increase the GFCI sensitivity or use GFCI with a higher threshold.
•
Use
C6-02 [Carrier Frequency Selection]
to decrease the carrier frequency.
•
Decrease the length of the cable used between the drive and the motor.
•
Install a noise filter or AC reactor on the output side of the drive. Set
C6-02 = 1 [2.0 kHz]
when
connecting an AC reactor.
•
Disable the internal EMC filter.
◆
Motor Rotation Causes Unexpected Audible Noise from Connected Machinery
Causes
Possible Solutions
The carrier frequency and the resonant frequency of the connected machinery
are the same.
•
Adjust
C6-02 to C6-05 [Carrier Frequency]
.
•
Set
C6-02 = 1 to 6 [Carrier Frequency Selection = Frequency other than Swing PWM]
.
Note:
If
C6-02 = 7 to A [Carrier Frequency Selection = Swing PWM]
, the drive will not know if the
noise comes from the drive or the machine.
The drive output frequency and the resonant frequency of the connected
machinery are the same.
•
Adjust
d3-01 to d3-04 [Jump Frequency]
.
•
Put the motor on a rubber pad to decrease vibration.
Summary of Contents for H6B1A002
Page 12: ...12 YASKAWA SIEPYAIH6B01A HV600 AC Drive Bypass Technical Reference...
Page 74: ...Page Intentionally Blank...
Page 76: ...Page Intentionally Blank...
Page 454: ...5 14 Z Bypass Parameters 454 YASKAWA SIEPYAIH6B01A HV600 AC Drive Bypass Technical Reference...
Page 590: ...8 6 Storage Guidelines 590 YASKAWA SIEPYAIH6B01A HV600 AC Drive Bypass Technical Reference...
Page 780: ...11 3 European Standards 780 YASKAWA SIEPYAIH6B01A HV600 AC Drive Bypass Technical Reference...







































































