


























3-5
188791-1
188791-1
3
Factory Settings
3.2 Torque Sensor Calibration
Smart Series HC10DT
Collaborative Robot
3.2 Torque Sensor Calibration
For the Collaborative Robot system to function properly, Torque Sensor
Calibration must be performed prior to programming the first job and/or
mounting any EOAT (End of Arm Tooling)
To calibrate the Robot’s torque sensors:
1. Complete
2. Select MENU
→
“Safety Settings”
→
“Torque Sensor Calibration”
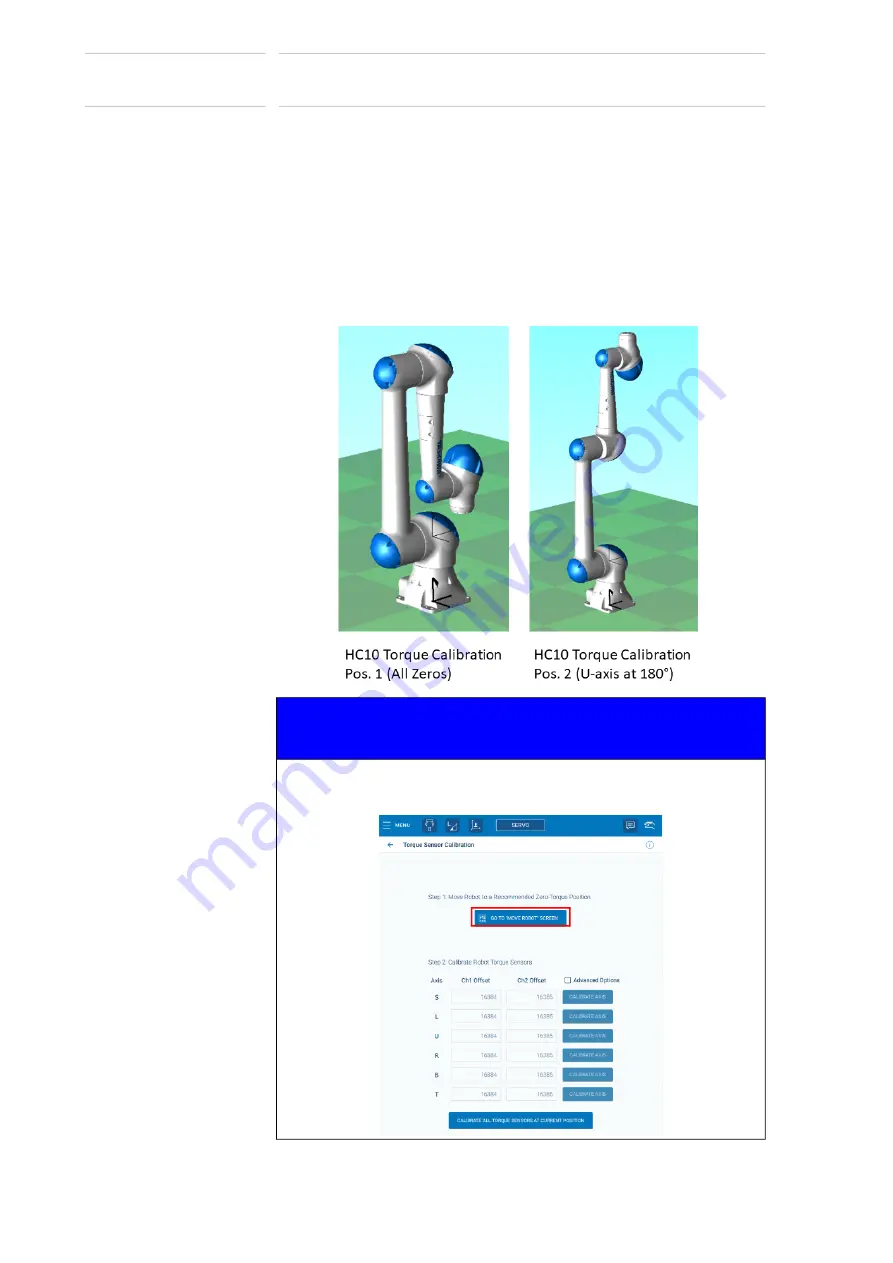
3. Move the Robot to a position where the gravitational torque (e.g. by a
tool or other external loads) is near zero for all axes.
Fig. 3
-
1: Torque Calibration
NOTICE
If the Robot is not at a recommended position, the {GO TO “MOVE
ROBOT” SCREEN} button displays in blue. Press this button to move
the Robot to the recommended position.







































































