












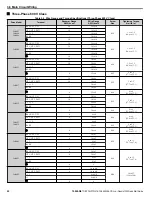

















Drive Model
Terminal
Recomm. Gauge
AWG, kcmil
Wire Range
AWG, kcmil
Screw
Size
Tightening Torque
N·m (lb.in.)
5A0077
R/L1, S/L2, T/L3
3
10 to 4/0
M10
18 to 23
(159 to 204)
U/T1, V/T2, W/T3
3
10 to 4/0
–, +1
–
3 to 4/0
+3
–
6 to 4/0
4
4
5A0099
R/L1, S/L2, T/L3
1/0
10 to 4/0
M10
18 to 23
(159 to 204)
U/T1, V/T2, W/T3
1
10 to 4/0
–, +1
–
2 to 4/0
+3
–
4 to 4/0
4
4
5A0125
R/L1, S/L2, T/L3
2/0
1 to 300
M10
18 to 23
(159 to 204)
U/T1, V/T2, W/T3
2/0
1 to 300
–, +1
–
2/0 to 3/0
+3
–
1 to 1/0
3
4 to 300
5A0145
R/L1, S/L2, T/L3
3/0
2/0 to 300
M10
18 to 23
(159 to 204)
U/T1, V/T2, W/T3
3/0
2/0 to 300
–, +1
–
3/0 to 4/0
+3
–
1/0 to 2/0
3
4 to 300
5A0192
R/L1, S/L2, T/L3
300
2/0 to 600
M12
32 to 40
(283 to 354)
U/T1, V/T2, W/T3
250
2/0 to 600
–, +1
–
2/0 to 400
+3
–
2/0 to 250
M10
18 to 23
(159 to 204)
1
1 to 350
M12
32 to 40
(283 to 354)
5A0242
R/L1, S/L2, T/L3
400
2/0 to 600
M12
32 to 40
(283 to 354)
U/T1, V/T2, W/T3
350
2/0 to 600
–, +1
–
2/0 to 500
+3
–
250 to 300
M10
18 to 23
(159 to 204)
1
1 to 350
M12
32 to 40
(283 to 354)
u
Main Circuit Terminal and Motor Wiring
This section outlines the various steps, precautions, and checkpoints for wiring the main circuit terminals and motor terminals.
WARNING!
Electrical Shock Hazard. Do not connect the AC power line to the output terminals of the drive. Failure to comply could result
in death or serious injury by fire as a result of drive damage from line voltage application to output terminals.
NOTICE:
When connecting the motor to the drive output terminals U/T1, V/T2, and W/T3, the phase order for the drive and motor should
match. Failure to comply with proper wiring practices may cause the motor to run in reverse if the phase order is backward.
NOTICE:
Do not connect phase-advancing capacitors or LC/RC noise filters to the output circuits. Failure to comply could result in damage
to the drive, phase-advancing capacitors, LC/RC noise filters or ground fault circuit interrupters.
n
Cable Length Between Drive and Motor
Voltage drop along the motor cable may cause reduced motor torque when the wiring between the drive and the motor is too
long, especially at low frequency output. This can also be a problem when motors are connected in parallel with a fairly long
motor cable. Drive output current will increase as the leakage current from the cable increases. An increase in leakage current
may trigger an overcurrent situation and weaken the accuracy of the current detection.
Adjust the drive carrier frequency according to
. If the motor wiring distance exceeds 100 m because of the system
configuration, reduce the ground currents.
3.6 Main Circuit Wiring
YASKAWA
TOEP YAIP1W 01A YASKAWA AC Drive - iQpump1000 Quick Start Guide
93
3
Electrical Installation
Summary of Contents for iQpump1000
Page 355: ......







































































