


























5 Operation
5.3.5 Zero Clamp Function
5-24
5.3.5
Zero Clamp Function
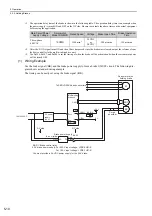
The zero clamp function locks the servo when the input voltage of the speed reference (V-REF) drops below
the speed set in the zero clamp level (Pn501) while the zero clamp signal (/P-CON or /ZCLAMP) is ON. The
multi-winding drive unit internally forms a position loop, ignoring the speed reference.
The zero clamp function is used for systems in which the host controller does not form a position loop for the
speed reference input.
The servomotor is clamped within one pulse of the position when the zero clamp function is turned ON, and
will still return to the zero clamp position even if it is forcibly rotated by external force.
Adjust the position loop gain (Pn102) if the servomotor oscillates in the zero clamp state. If the gain switching
function is used, adjusting the 2nd position loop gain (Pn106) is required as well. For details, refer to
6.6.1
Switching Gain Settings
.
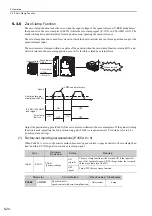
(1) Factory-set Input Signal Allocations (Pn50A.0 = 0)
When Pn000.1 is set to A, the control method becomes "speed control
↔
speed control with zero clamp func-
tion" and the /P-CON signal is used as a zero clamp signal.
V-REF
/P-CON
(/ZCLAMP)
Host controller
Speed reference
Stops precisely!
Zero clamp
V-REF speed reference
Speed
/P-CON (/ZCLAMP)
input signal
Zero clamp
function
Time
ON
ON
ON
OFF
OFF
OFF
Set value for zero
clamp level (Pn501)
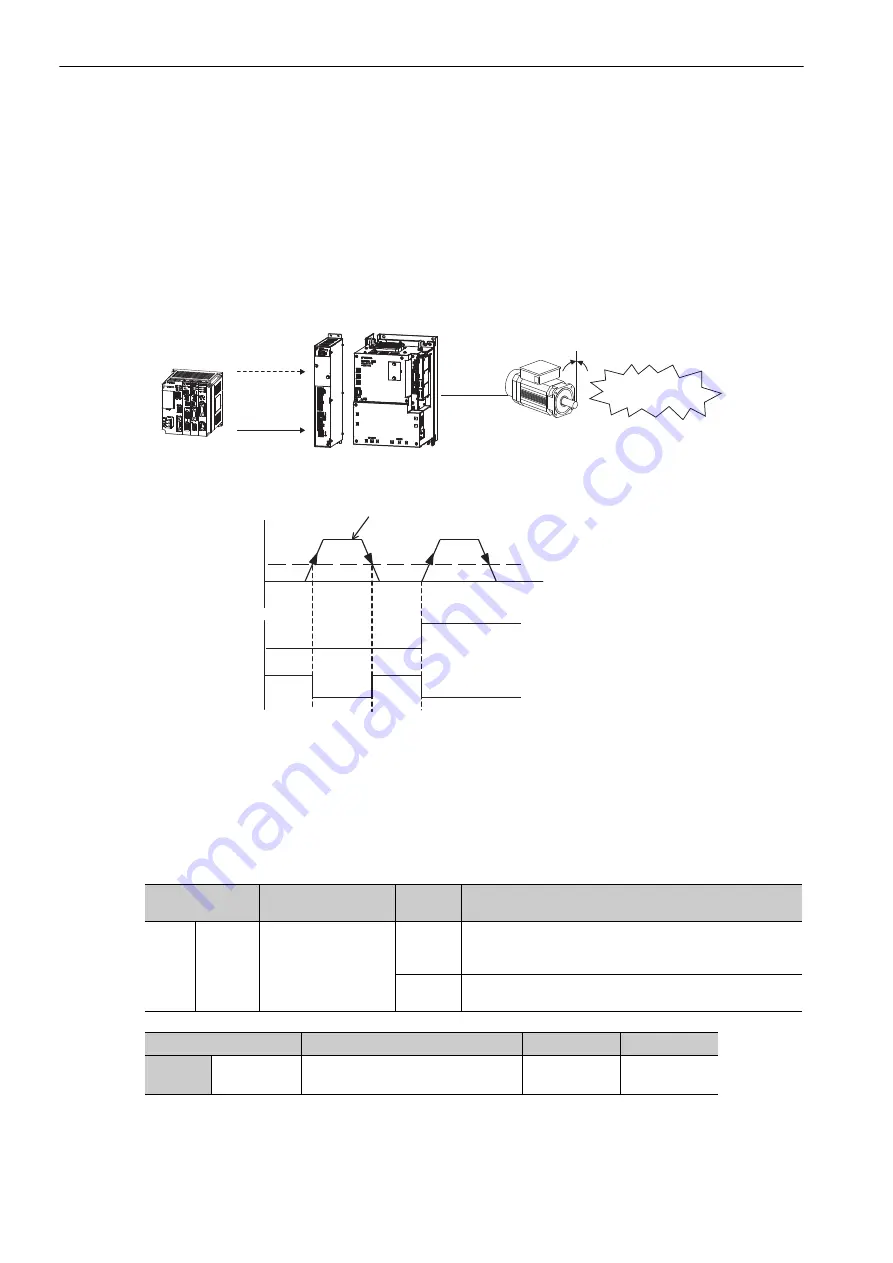
Type
Connector
Pin Number
Setting
Meaning
Input
/P-CON
CN1-41
[Factory setting]
ON
(closed)
The zero clamp function will be turned ON if the input volt-
age of the speed reference (V-REF) drops below the set speed
in the zero clamp level (Pn501).
OFF
(open)
Turns OFF the zero clamp function.
Parameter
Control Method
When Enabled Classification
Pn000
n.
A
Speed control
↔
speed control with zero clamp function
After restart
Setup







































































