



























xvi
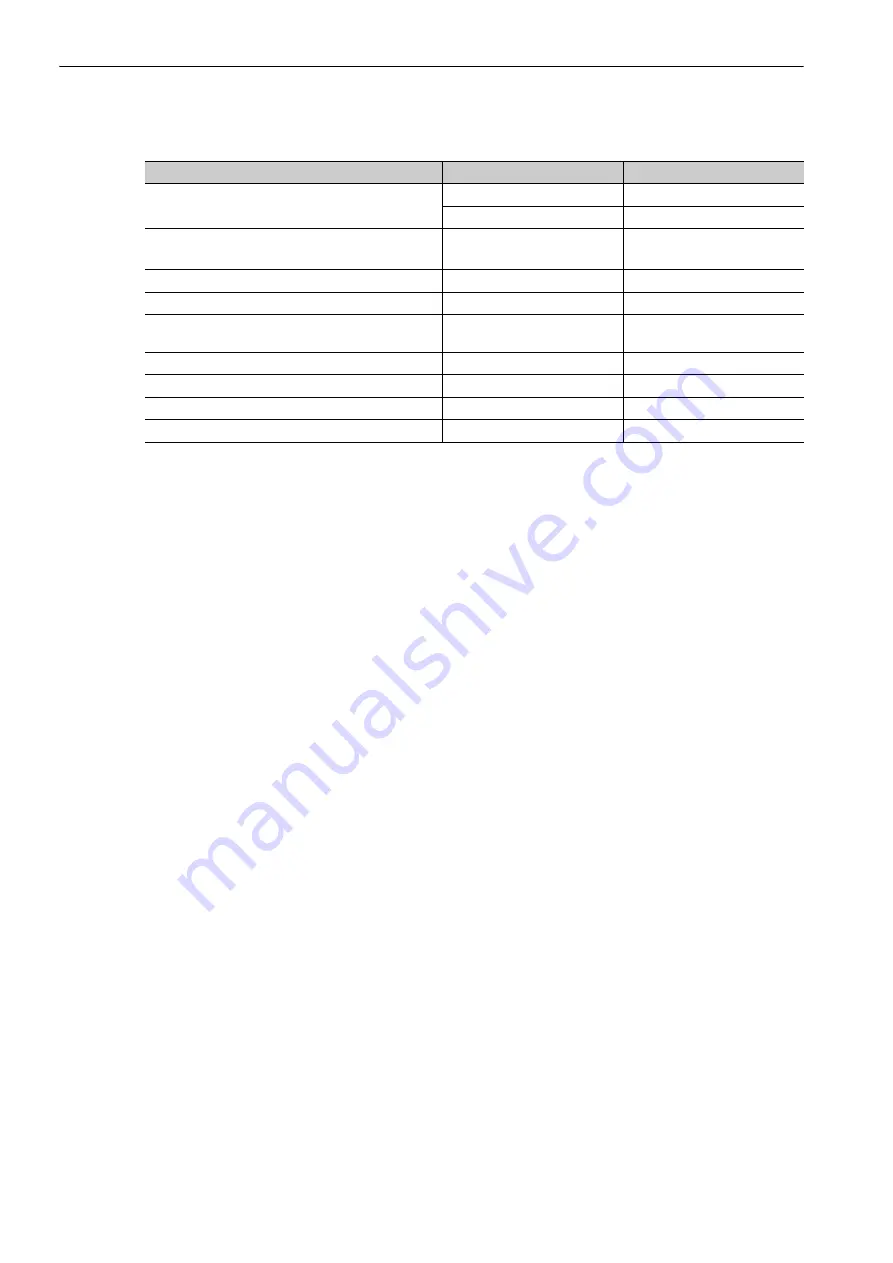
Safe Performance
Items
Standards
Performance Level
Safety Integrity Level
IEC 61508
SIL2
IEC 62061
SILCL2
Probability of Dangerous Failure per Hour
IEC 61508,
IEC 62061
PFH
≤
1.7
×
10
-9
[1/h]
(0.17% of SIL2)
Category
EN 954-1
Category 3
Performance Level
EN ISO 13849-1
PL d (Category 3)
Mean Time to Dangerous Failure of Each
Channel
EN ISO 13849-1
MTTFd: High
Average Diagnostic Coverage
EN ISO 13849-1
DCave: Low
Stop Category
IEC 60204-1
Stop category 0
Safety Function
IEC 61800-5-2
STO
Proof test Interval
IEC 61508
10 years







































































