
























5.9 Absolute Encoders
5-71
5
Op
er
at
io
n
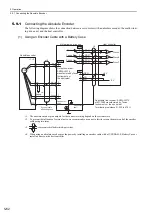
(3) Rotational Serial Data Specifications and Initial Incremental Pulses
Rotational Serial Data Specifications
The rotational serial data is output from PAO signal.
Initial Incremental Pulses
The initial incremental pulses are output after division inside the multi-winding drive unit in the same way as
for normal incremental pulses. Refer to
5.3.6 Encoder Output Pulses
for details.
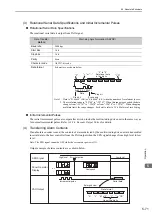
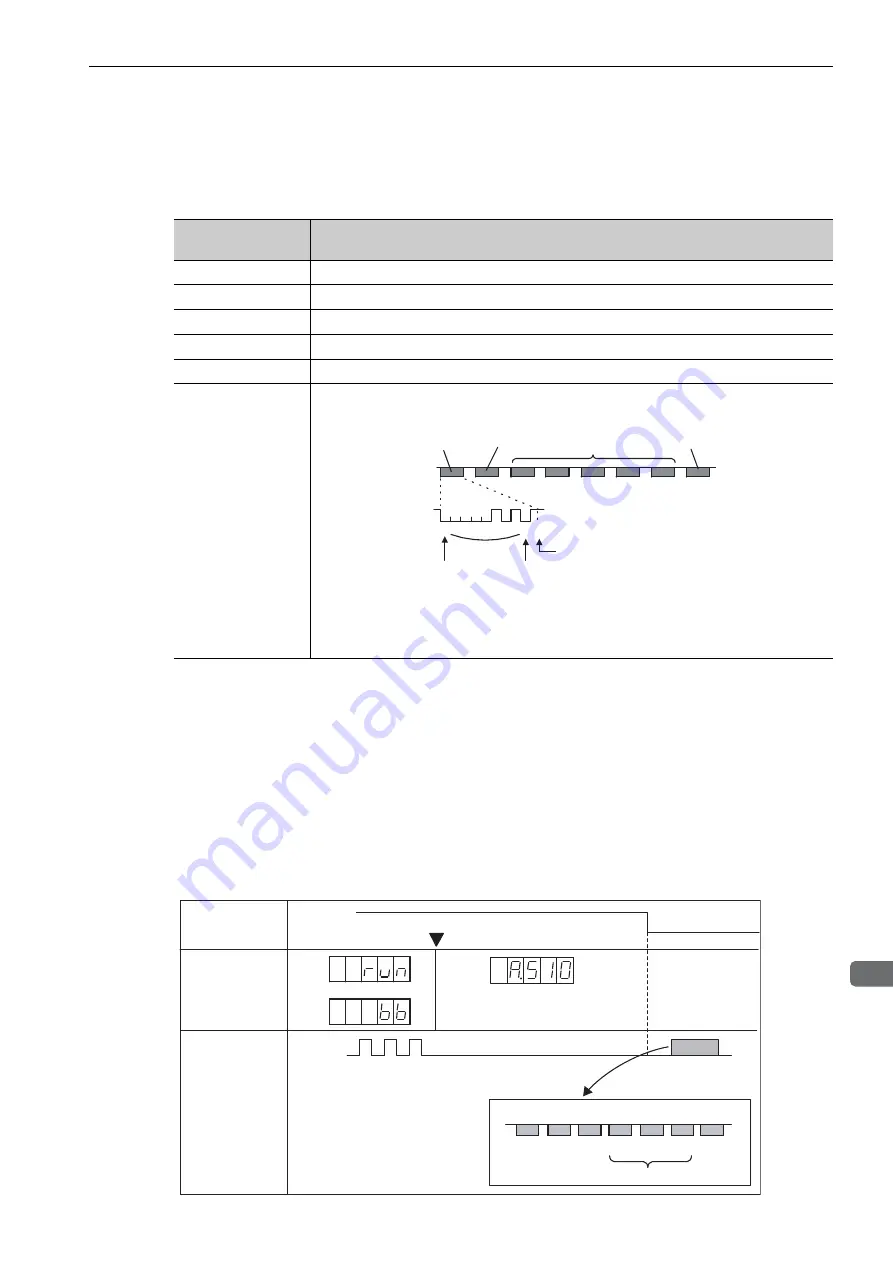
(4) Transferring Alarm Contents
If an absolute encoder is used, the contents of alarms detected by the multi-winding drive unit are transmitted
in serial data to the host controller from the PAO output when the SEN signal changes from high level to low
level.
Note: The SEN signal cannot be OFF while the servomotor power is ON.
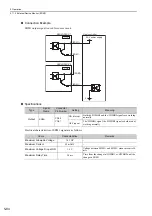
Output example of alarm contents are as shown below.
Data Transfer
Method
Start-stop Synchronization (ASYNC)
Baud rate
9600 bps
Start bits
1 bit
Stop bits
1 bit
Parity
Even
Character code
ASCII 7-bit code
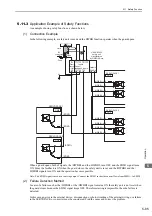
Data format
8 characters, as shown below.
Note 1. Data is "P+00000" (CR) or "P-00000" (CR) when the number of revolutions is zero.
2. The revolution range is "-32768" to "+32767". When this range is exceeded, the data
changes from "+32767" to "-32678" or from "-32678" to "+32767". When changing
multiturn limit, the range changes. For details, refer to
5.9.6 Multiturn Limit Setting
.
Data
Start bit
Even parity
Rotational data
in five digits
"+" or " - "
"0" to "9"
"CR"
"P"
Stop bit
0 0 0 0 0 1 0 1 0 1
Rotation
“A” “L” “M” “5” “1” “.” “CR”
Low level
High level Error detection
or
Overspeed
Incremental pulse
Serial data
Enlarged view
SEN Signal
Panel Operator
Display
PAO Output
Data format
Upper two digits







































































