


























6.6 Additional Adjustment Function
6-43
6
Adjustments
6.6.3
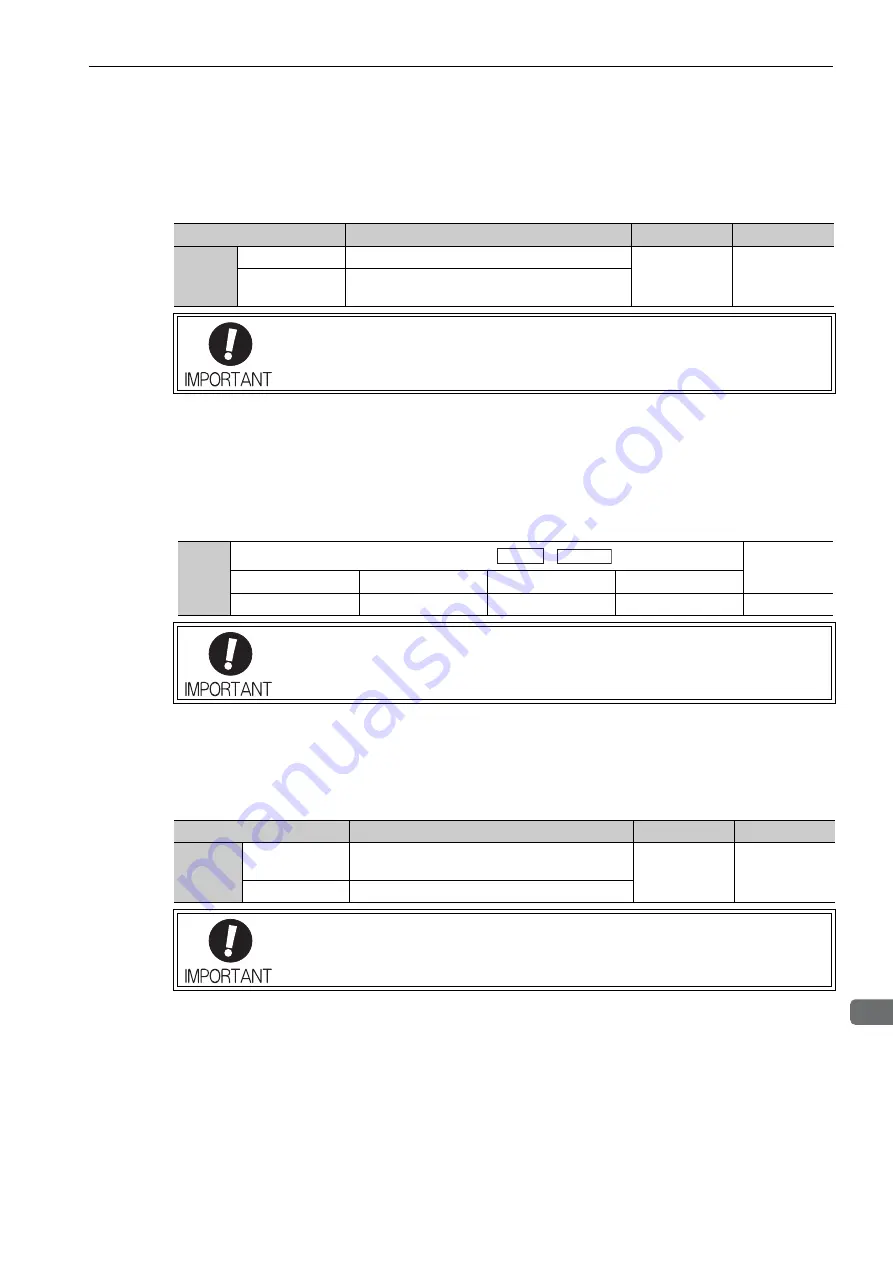
Current Control Mode Selection Function
This function reduces high-frequency noises while the servomotor is being stopped. This function is enabled
by default.
6.6.4
Current Gain Level Setting
This function reduces noises by adjusting the parameter value for current control inside the multi-winding
drive unit according to the speed loop gain (Pn100). You can reduce the noise level by reducing the current
gain level (Pn13D) from its factory setting of 2000% (disabled). Adjust the current gain level within the allow-
able range at which multi-winding drive unit response characteristics can be secured. This function is always
disabled in torque control (Pn000.1 = 2).
6.6.5
Speed Detection Method Selection
This function can ensure smooth movement of the servomotor while the servomotor is running. Set the value
of Pn009.2 to 1 and select speed detection 2 to smooth the movement of the servomotor while the servomotor
is running.
Parameter
Meaning
When Enabled
Classification
Pn009
n.
0
Selects the current control mode 1.
After restart
Tuning
n.
1
[Factory setting]
Selects the current control mode 2 (low noise).
• If current control mode 2 is selected, the load ratio may increase while the servomotor
is being stopped.
Pn13D
Current Gain Level
Classification
Setting Range
Setting Unit
Factory Setting
When Enabled
100 to 2000
1%
2000
Immediately
Tuning
• If the parameter setting of the current gain level is changed, the responses character-
istics of the speed loop will also change. The multi-winding drive unit must, therefore,
be readjusted again.
Speed
Position
Parameter
Meaning
When Enabled
Classification
Pn009
n.
0
[Factory setting]
Selects speed detection 1.
After restart
Tuning
n.
1
Selects speed detection 2.
• If the speed detection method is changed, the response characteristics of the speed
loop will change and the multi-winding drive unit must be readjusted again.







































































