




























Technical data
6
-
35
6.5.2
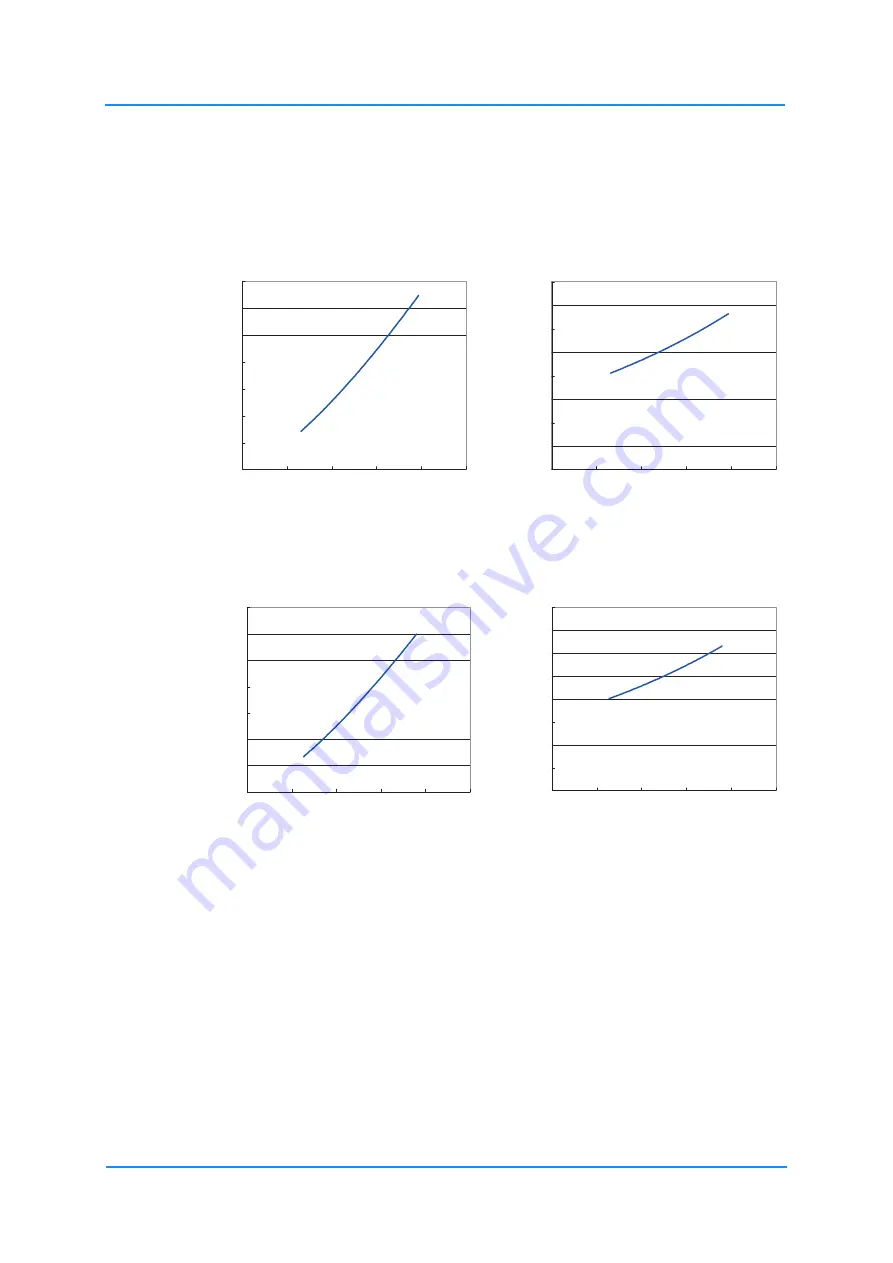
Stop category 1
The stopping angle and time at the emergency stop in category 1 are not subjected to the
robot position and the load.
Stop of category1 doesn't depend on the robot position and the load.
6.5.2.4
Stop position S-axis
Fig. 6-14: Stop position
6.5.2.5
Stop position L-axis
Fig. 6-15: Stop position
[deg]
[deg/s]
[deg/s]
[sec]
㻜
㻝㻜
㻞㻜
㻟㻜
㻠㻜
㻡㻜
㻢㻜
㻣㻜
㻜
㻡㻜
㻝㻜㻜
㻝㻡㻜
㻞㻜㻜
㻞㻡㻜
㻜
㻜㻚㻝
㻜㻚㻞
㻜㻚㻟
㻜㻚㻠
㻜㻚㻡
㻜㻚㻢
㻜㻚㻣
㻜㻚㻤
㻜
㻡㻜
㻝㻜㻜
㻝㻡㻜
㻞㻜㻜
㻞㻡㻜
[deg]
[deg/s]
[deg/s]
[sec]
㻜
㻝㻜
㻞㻜
㻟㻜
㻠㻜
㻡㻜
㻢㻜
㻣㻜
㻜
㻡㻜
㻝㻜㻜
㻝㻡㻜
㻞㻜㻜
㻞㻡㻜
㻜
㻜㻚㻝
㻜㻚㻞
㻜㻚㻟
㻜㻚㻠
㻜㻚㻡
㻜㻚㻢
㻜㻚㻣
㻜㻚㻤
㻜
㻡㻜
㻝㻜㻜
㻝㻡㻜
㻞㻜㻜
㻞㻡㻜





































































