





























9 Troubleshooting
9-4
A.81
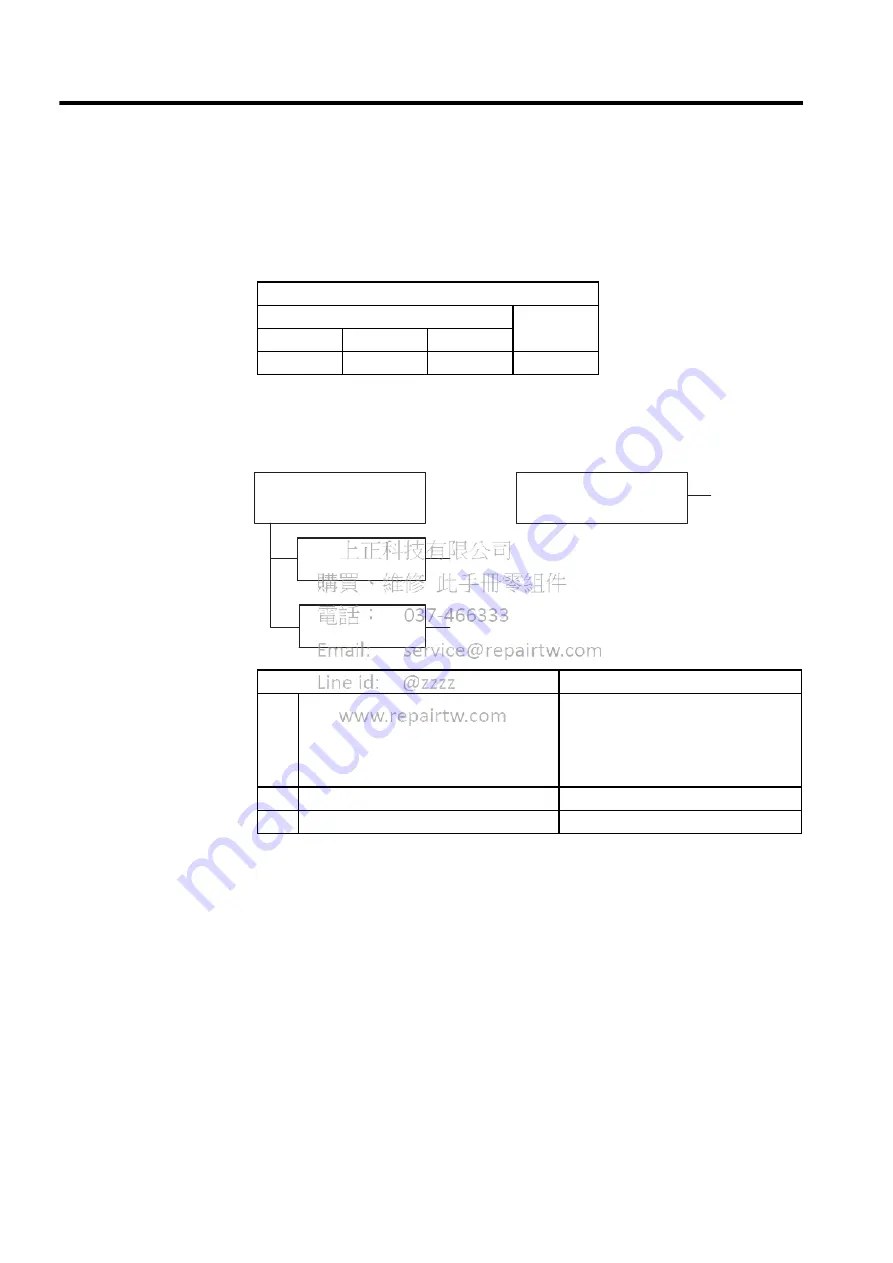
A.81: Encoder Backup Error
Display and Outputs
Note: OFF: Output transistor is OFF (alarm state).
Status and Remedy for Alarm
Alarm Outputs
Alarm Code Outputs
ALM Output
ALO1
ALO2
ALO3
OFF
OFF
OFF
OFF
Cause
Remedy
A
The following power supplies to the absolute
encoder all failed:
• +5 V supply (supplied from the
SEROVPACK)
• Battery power
Follow absolute encoder set-up procedure.
B
Absolute encoder malfunctioned.
Replace the servomotor.
C
Circuit board (1PWB) is defective.
Replace the SERVOPACK.
At power ON
Pn002.2 = 0
Pn002.2 = 1
A, B, C
C
At SENS_ON command
A, C







































































