





























4 MECHATROLINK-
II
Communications
4.3.9 MECHATROLINK-
II
Connection (CONNECT: 0EH)
4-16
4.3.9
MECHATROLINK-
II
Connection (CONNECT: 0EH)
Details of COM_MOD
Byte
Byte
CONNECT
Description
Description
Command
Response
1
0EH
0EH
Processing
classifications
Network com-
mand group
Synchronization
classifications
Asynchronous
2
ALARM
Processing time
Communications
cycle or more
Subcommand
Cannot be used.
3
STATUS
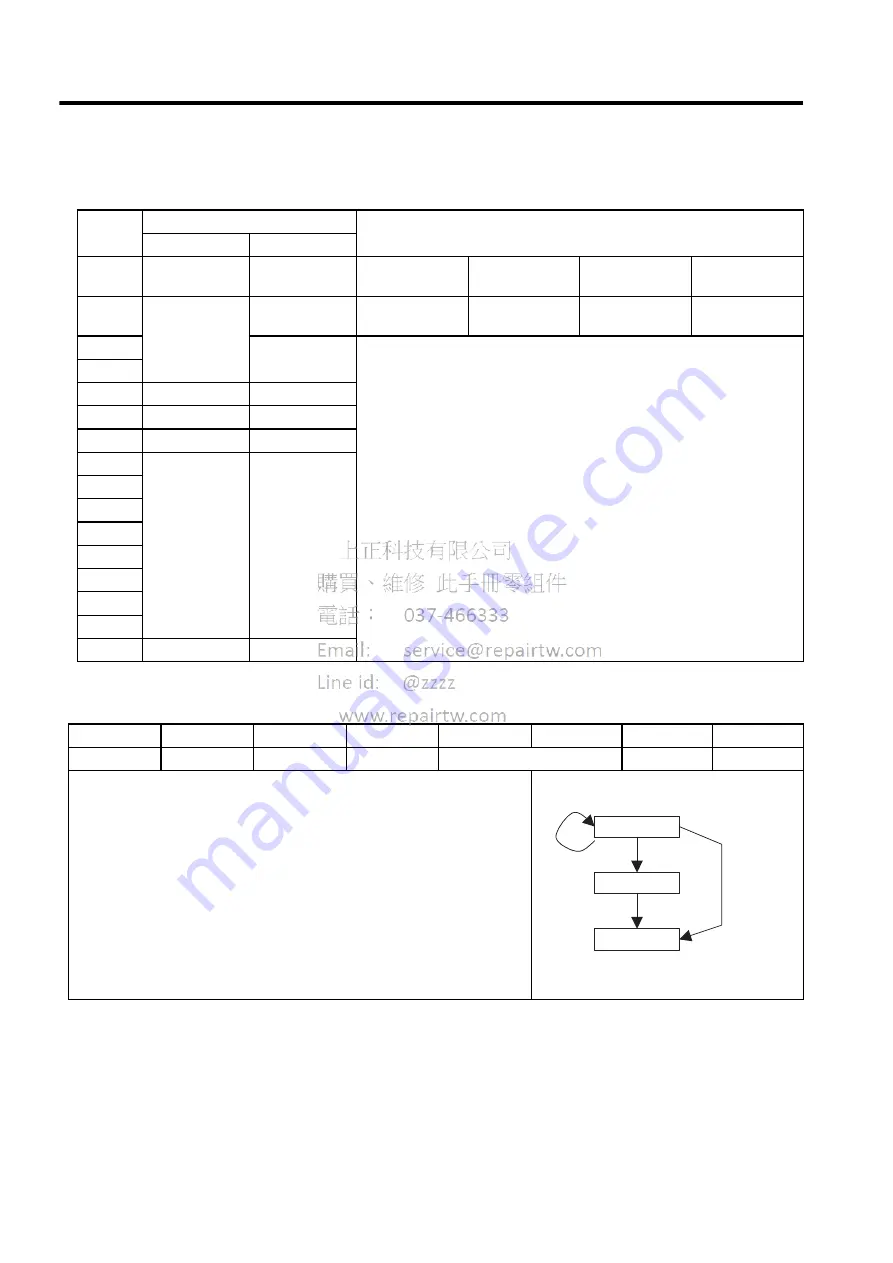
• Establishes a MECHATROLINK-II connection. Sets the communications
mode according to COM_MOD.
• VER: Version
• Set VER to 21H (Ver. 2.1).
• COM_MOD: Communications mode. Refer to the following table.
• COM_TIM: Communications cycle
Set the multiple number of transmission cycle in the range of 1 to 32.
1 [ms]
≤
transmission cycle [ms]
×
COM_TIM
≤
32 [ms]
(Set the multiple number of 1 [ms].)
• A warning will occur and the command will be ignored in the following cases.
- If COM_MOD is not within range: Parameter setting warning (A.94)
- If COM_TIM is not within range: Parameter setting warning (A.94)
- If the transmission bytes is 17, and SUBCMD is 1: Parameter setting
warning (A.94)
4
5
VER
VER
6
COM_MOD
COM_MOD
7
COM_TIM
COM_TIM
8
9
10
11
12
13
14
15
16
WDT
RWDT
D7
D6
D5
D4
D3
D2
D1
D0
SUBCMD
0
0
0
DTMOD
SYNCMOD
0
• SYNCMOD*:
0: Asynchronous communication
(The SERVOPACK changes communication to phase 2.)
1: Synchronous communication
(The SERVOPACK changes communication to phase 3.)
∗
Set SYNC_SET when the SERVOPACK changes communication to phase 3.
• DTMOD: Data transfer method
00, 11: Single transfer
01: Consecutive transfer
10: Multiple transfers (not supported)
• SUBCMD:
0: Subcommand not used
1: Subcommand used
Phase 1
Phase 2
Phase 3
SYNCMOD=0
SYNC_SET
Warning/alarm
SYNCMOD=1






































































