





























4.3 Main Commands
4-37
4
4.3.28
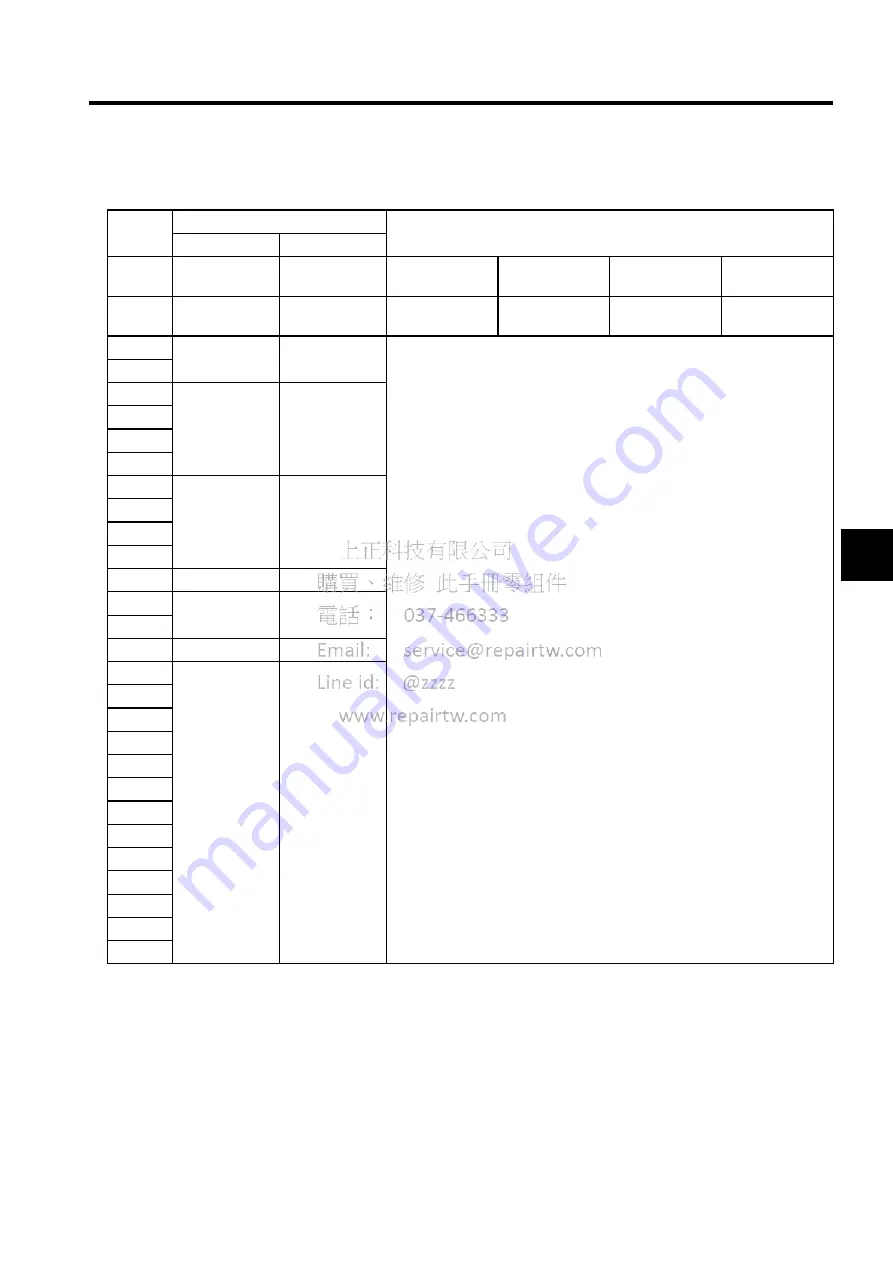
External Input Positioning (EX_POSING: 39H)
Byte
EX_POSING
Description
Command
Response
1
39H
39H
Processing
classifications
Motion command
group
Synchronization
classifications
Asynchronous
2
LT_SGN
ALARM
Processing time
Within communi-
cations cycle
Subcommand
Can be used.
3
OPTION
STATUS
• Moves toward the target position (TPOS) at the target speed (TSPD). When a
latch signal is input midway, positioning is performed according to the final
travel distance for external position specified in the parameter. When no latch
signal is input, positioning is performed for the target position.
• Can be used during phases 2 and 3.
• A command warning will occur and the command will be ignored in the fol-
lowing cases.
- During phase 1: MECHATROLINK-II command warning (A.95)
- If the SERVOPACK is Servo OFF:
MECHATROLINK-II command warning (A.95)
- If the target speed (TSPD) exceeds the limit: Parameter setting
warning (A.94)
- If LTMOD_ON/OFF is received during EX_POSING execution or
simultaneously: MECHATROLINK-II command warning (A.95)
(the LTMOD_ON/OFF commands will be ignored.)
• OPTION can be selected. Refer to
4.5.2 Option Field Specifications:
OPTION
for details.
• The target position (TPOS) is a signed 4 bytes [units/s]. It is set using an abso-
lute position in the reference coordinate system.
• The target speed (TSPD) is an unsigned 4 bytes. It is set using units/s.
• After the latch is input, any changes to the target position during motion will
be ignored.
• After the latch is input, use DEN (output complete) to confirm the completion
of position reference output.
• It takes 4 ms max. for the Request Latch Mode command to start.
• If EX_POSING command is received during modal latch mode, the
EX_POSING command is enabled.
• The maximum positioning distance referenced by one POSING command is
2147483647 (7FFFFFFFH).
Execute the POSING command so that the following equation is satisfied:
Target position (TPOS)
−
current position (POS)
≤
The maximum positioning
distance
4
5
TPOS
MONITOR1
6
7
8
9
TSPD
MONITOR2
10
11
12
13
SEL_MON 1/2
SEL_MON 1/2
14
I/O_MON
15
16
WDT
RWDT
17
For
subcommands
use. Refer to
4.4 Subcom-
mands
.
For
subcommands
use. Refer to
4.4 Subcom-
mands
.
18
19
20
21
22
23
24
25
26
27
28
29







































































