




























Maintenance and inspection
9
-
78
9.7
Setting the second home position (check point)
9.7.1
Purpose of position check operation
If the absolute number of rotation detected at power supply ON does not match the data
stored in the absolute encoder the last time the power supply was turned off, alarm 4107
“OUT OF RANGE (ABSO DATA)” is issued when the controller power is turned ON.
There are two possible causes of this alarm:
•
An error was found in the encoder communication related components.
•
No error was found in the encoder communication related components, but the robot
was moved after the power supply was turned OFF.
If there is an error in the encoder communication related components, the robot may stall
when playback is started. If the absolute data allowable range error alarm has occurred,
playback and test runs will not function and the position must be checked.
1. Position check
After the “OUT OF RANGE (ABSO DATA)” alarm occurs, move to the second home
position using the axis keys and perform the position confirmation. For performing the
position confirmation, refer to chapter “Procedure after the Alarm”. Playback and test
runs will not function unless “CONFIRM POSITION” is performed.
2. Pulse difference check
The pulse number at the second home position is compared with that at the current
position. If the difference is within the allowable range, playback is enabled. If not, the
alarm occurs again.
•
The allowable range pulse is the number of pulses per rotation of the motor (PPR data).
•
The initial value of the second home position is the home position (where all axes are
at pulse 0). The second home position can be changed. For details, refer to chapter
“Procedure for the Second Home Position Setting (Check Point)”.
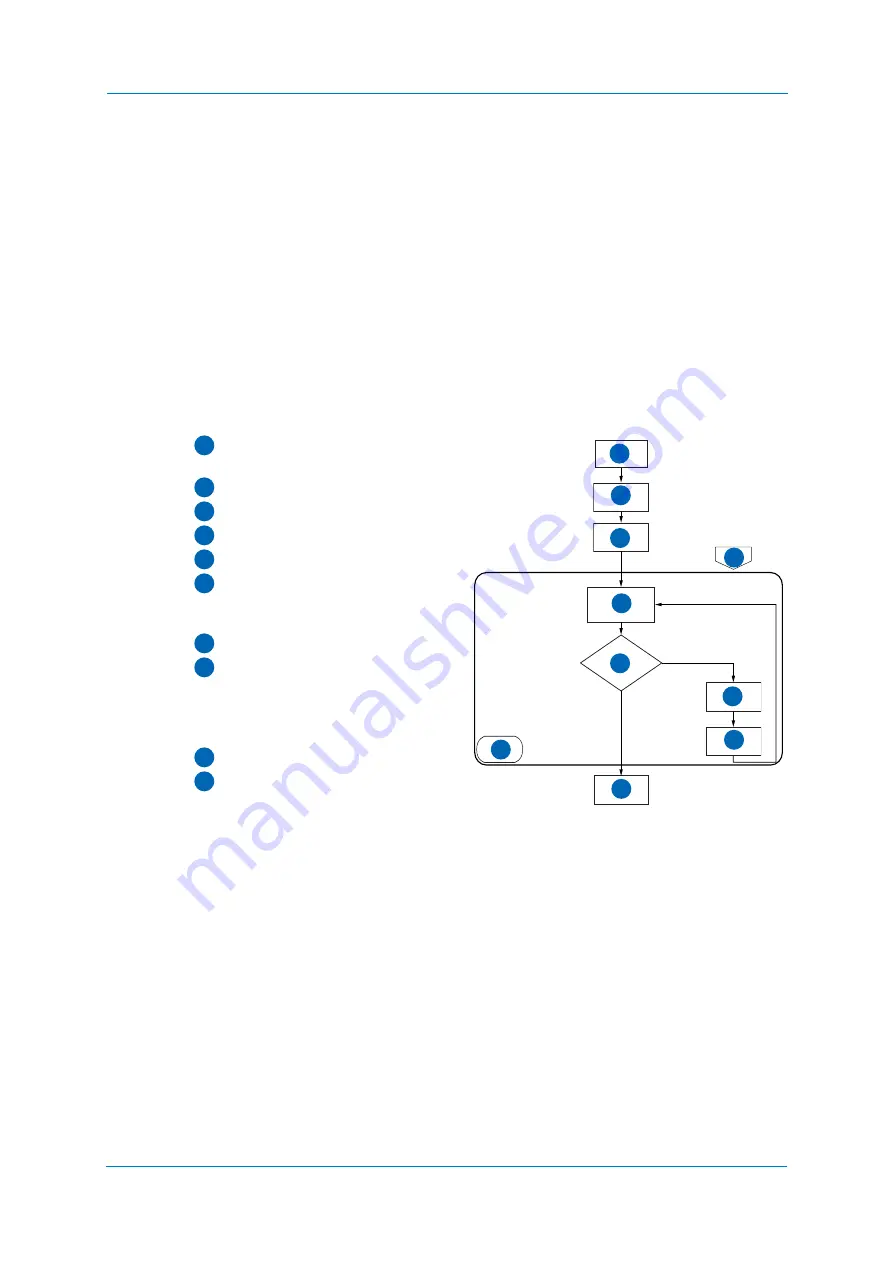
3. Alarm Occurrence
If the "OUT OF RANGE (ABSO DA-
TA)" alarm occurs:
Reset alarm
Turn ON SERVO power
Procedure after alarm occurs
Position confirmation operation
Compare second home position
(check point)* with current position
pulses.
Alarm occurs again
Correct defective axis
• Replace encoder communication re-
lated components
• Home position calibration
* Position checking point
Playback possible
1
OK
NOK
1
2
3
4
5
6
7
8
9
10
2
3
4
5
6
7
8
9
10


































































