



























Transportation
3
-
14
3
Transportation
CAUTION!
Personal injury or damage to property
The system consists of precision components. If this precaution is not taken, performance
may be impaired.
A crane or forklift may only be operated by authorized personnel. The same applies to
the use of slings.
Avoid strong vibrations or impacts during transportation.
No external forces may be exerted on the robot controller, on the robot or on other
components.
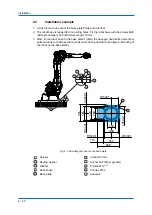
3.1
Transporting method
CAUTION!
Damage to persons and damage to property due to external force influences
External forces must not be exerted on the robot or the motors.
•
Check that the eyebolts are securely fastened.
•
The robot weights approximately 550 kg. Use load carrying devices strong enough to
withstand the weight.
•
The transport safety devices support the robot; therefore, use them exclusively for the
transport of the robot.
•
Before transport, be sure to mount the shipping bolts and brackets to the robot.







































































