





























INSTALLATION
MOTO
MAN
4-29
ArcWorld IV-6200 XHD DR2C System Manual
4.11.7
Anchor Remaining Fence to Floor – Right Side
Remaining cell walls are anchored using provided 3/8-inch concrete anchors.
Holes must be drilled into concrete. See Figure 4-22 for fence anchor points. Do
not floor-anchor either light curtain fence post located in front of positioner. They
will be anchored into the cement after the light curtains are properly aligned.
To anchor remaining fence (except light curtain wall) to the floor, proceed as
follows:
1. Prepare a factory-supplied anchor and nut, as shown in Figure 4-4 (leveling
bolts are not needed), for each anchor hole in fence post.
NOTE:
Do not anchor the light curtain walls to the floor until after the light curtains have been properly
aligned.
2. Insert a 7/16-inch drill bit through the hole of each fence post and drill holes
(1 to 2 inches deep) for anchor bolts in floor at locations shown in Figure 4-28.
3. Vacuum concrete dust from holes.
4. Push concrete anchors through holes in fence post feet and into drilled holes
until it stops. A hammer may be needed.
5. Anchor the cell walls to the floor by tightening nut.
4.12
Installing the Cell Door
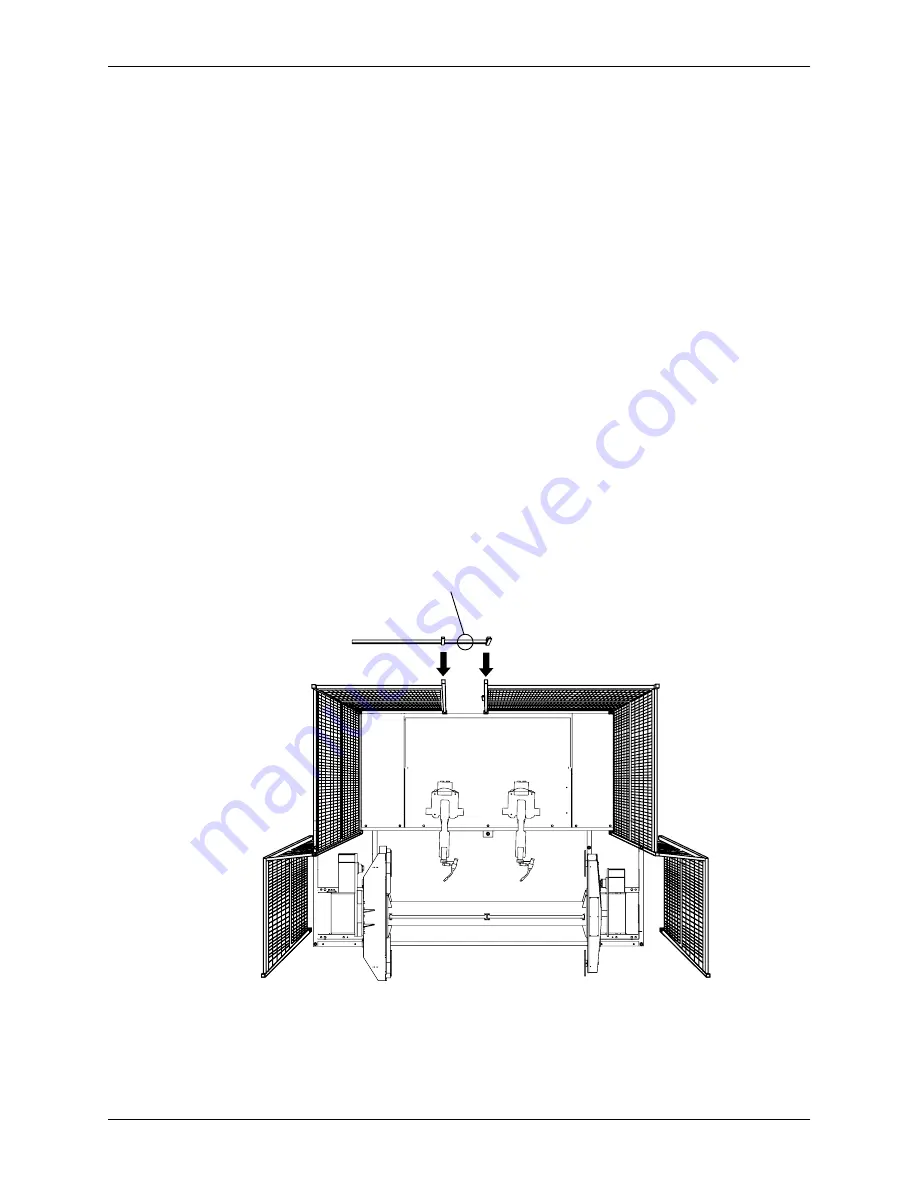
1. Steady both sections of the rear wall and install top door rail across door
opening, with the clamps provided (see Figure 4-32).
Figure 4-32 Install Top Door Rail
2. Raise cell door and slide it into position on door rail.
3. Close door and install remaining door rail clamp (see Figure 4-33).
INSTALL TOP
DOOR RAIL







































































