





























3.2 Mounting Procedures for Manipulator Base
3-3
3.2.1
Installation Example
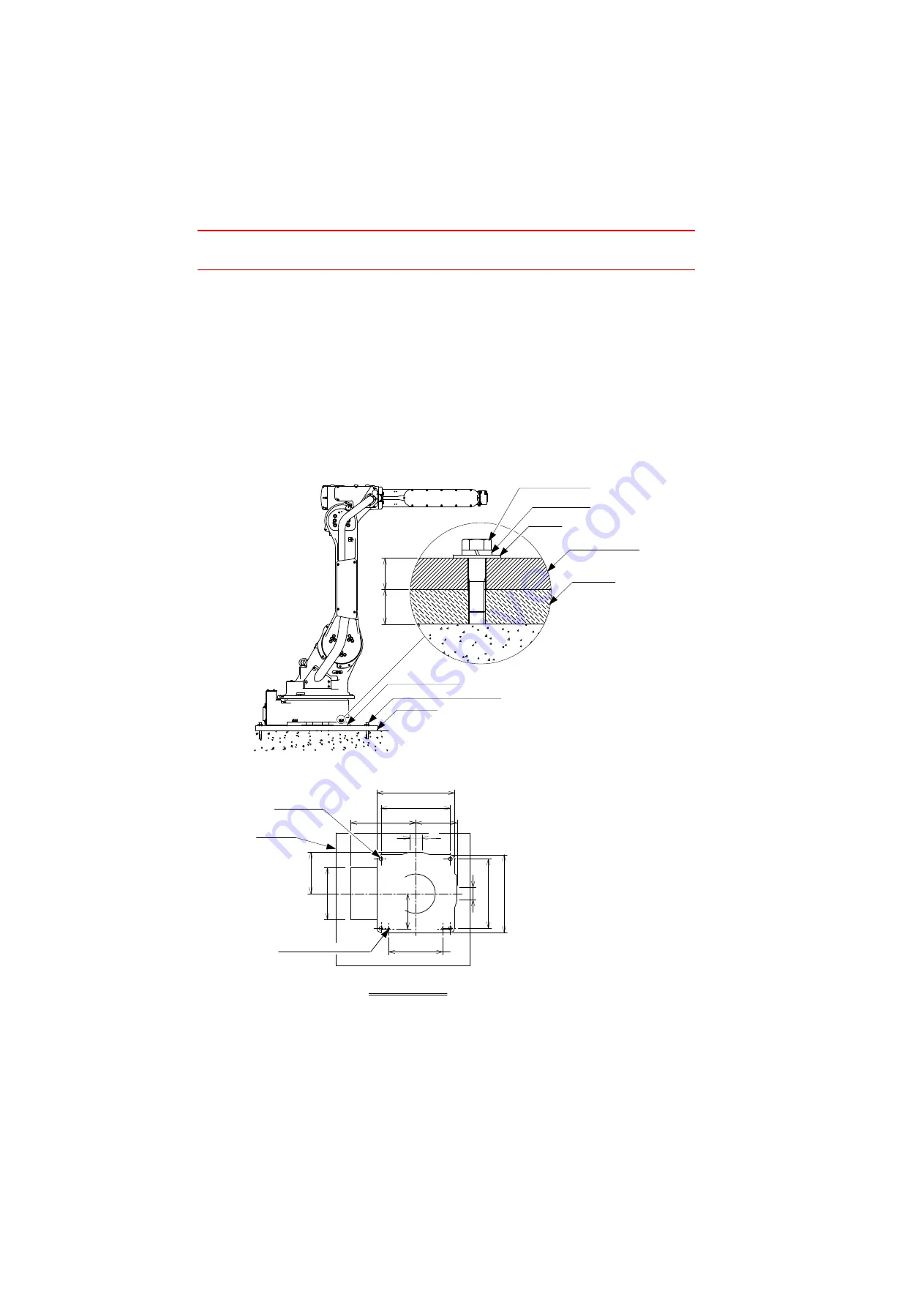
For the first process, anchor the baseplate firmly on the floor. The baseplate should have
enough rigidity, which is 32 mm or more in thickness. The size of the anchor bolt recom-
mended for the baseplate fixation is M16 or larger.
Next, fix the manipulator base to the baseplate. There are 4 mounting holes on the manipula-
tor base: securely fix the manipulator to the baseplate using 4 hexagon head screws M16 (60
mm long is recommended). Tighten the hexagon head screws and anchor bolts firmly so that
they will not be loosened during the operation. See "Fig. 4 Manipulator Installation Example"
for the method.
Fig. 4 Manipulator Installation Example
Baseplate
Spring washer
Bolt M16 (4 bolts)
Washer
Manipulator base
Baseplate
40 mm
or more
25
Manipulator base
Anchor bolt (M16 or larger)
Baseplate
18 dia. holes
(4 holes)
Manipulator Base
+0.018
0
12 dia. holes (2 holes)
375
60
335
±
0.1
200
313
375
335
±
0.1
170
±
0.1
260
60
250
±
0.1
200







































































