





























6 Test of Program Operation
6.1 Movement of the Axes
6-3
168283-1CD
168283-1CD
Hardware Installation &
Software Upgrade
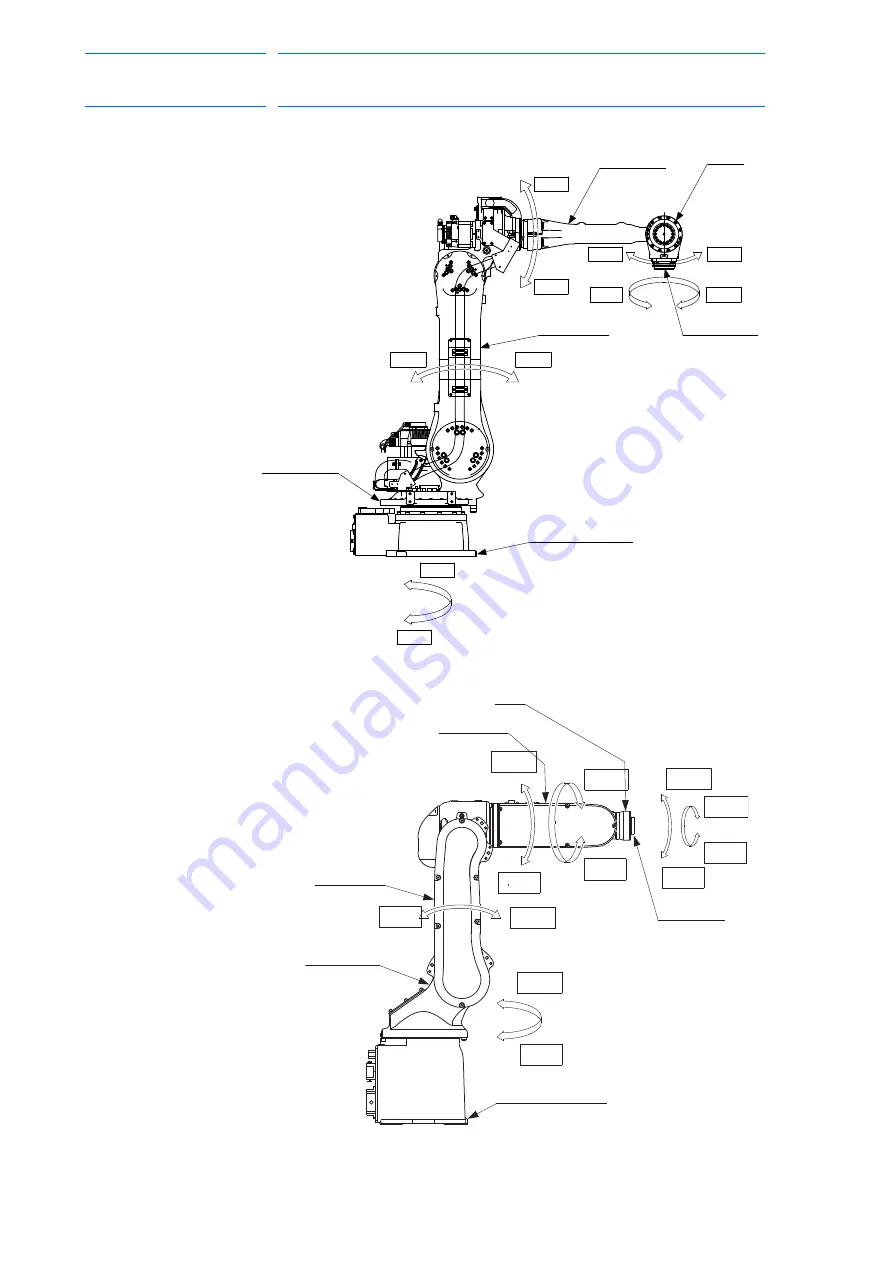
Fig. 6-2: 5-Axis Manipulator
Fig. 6-3: 6-Axis Manipulator
A
4-
A
3-
A
4+
A
3+
A
2-
A
2+
A
1-
A
1+
A
0-
A
0+
Wrist
Wrist flange
Lower arm
L-arm
Upper arm
U-arm
Rotary head
S-head
Manipulator base
Wrist
Upper arm
(U-arm)
Wrist flange
Manipulator base
Lower arm
(L-arm)
Rotary head
A
5-
A
5+
A
4+
A
4-
A
3-
A
3+
A
2-
A
2+
A
1-
A
1+
A
0-
A
0+
49 of 121







































































