





























3
Installation
3.2 Mounting Procedures for Manipulator Base
3-2
173124-1CD
HW1482991
MPL300
II
3.2
Mounting Procedures for Manipulator Base
The manipulator should be firmly mounted on a baseplate or foundation
strong enough to support the manipulator and withstand repulsion forces
during acceleration and deceleration.
Construct a solid foundation with the appropriate thickness to withstand
maximum repulsion forces of the manipulator as shown in
“Manipulator Repulsion Force and Torque”
.
During installation, if the flatness is not right, the manipulator shape may
be deformed and its functional ability may be compromised. The flatness
for baseplate must be kept at 0.5 mm or less. Fix the manipulator base as
described in
section 3.2.1 “Mounting the Manipulator and Fixture on the
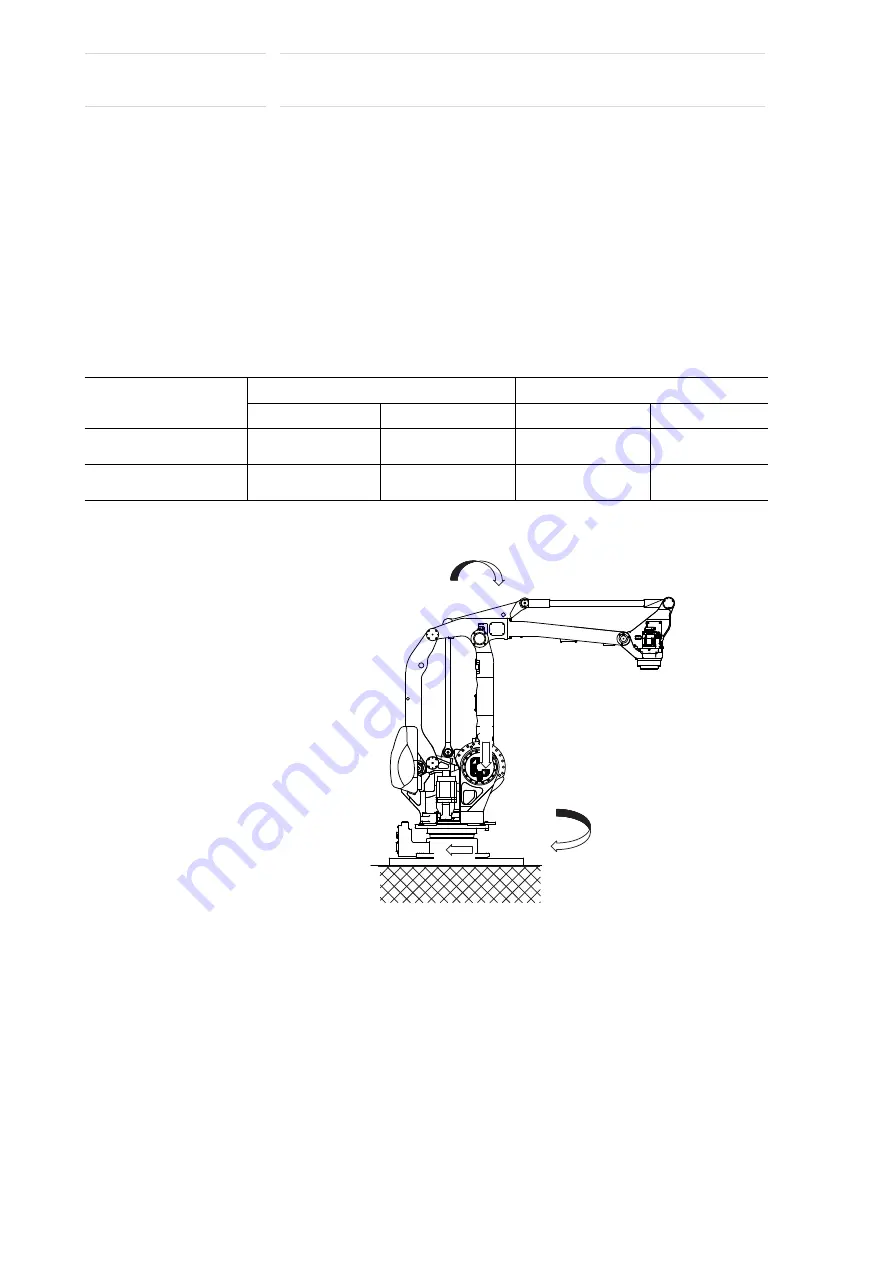
Fig. 3-1: Manipulator Repulsion Force and Torque
Table 3-1: Manipulator Repulsion Force and Torque
Horizontal rotation
Vertical rotation
Repulsion force F
H
Torque M
H
Repulsion force F
V
Torque M
V
Emergency stop
20580 N
(2100 kgf)
39200 N•m
(4000 kgf•m)
49980 N
(5100 kgf)
62720 N•m
(6400 kgf•m)
Acceleration/deceleration 6370 N
(650 kgf)
11760 N•m
(1200 kgf•m)
21560 N
(2200 kgf)
15680 N•m
(1600 kgf•m)
M
V
M
H
F
V
F
H
22 of 100







































































