





























2
Transport
2.1 Transporting Method
2-7
180788-1CD
HW1484370
MPX2600
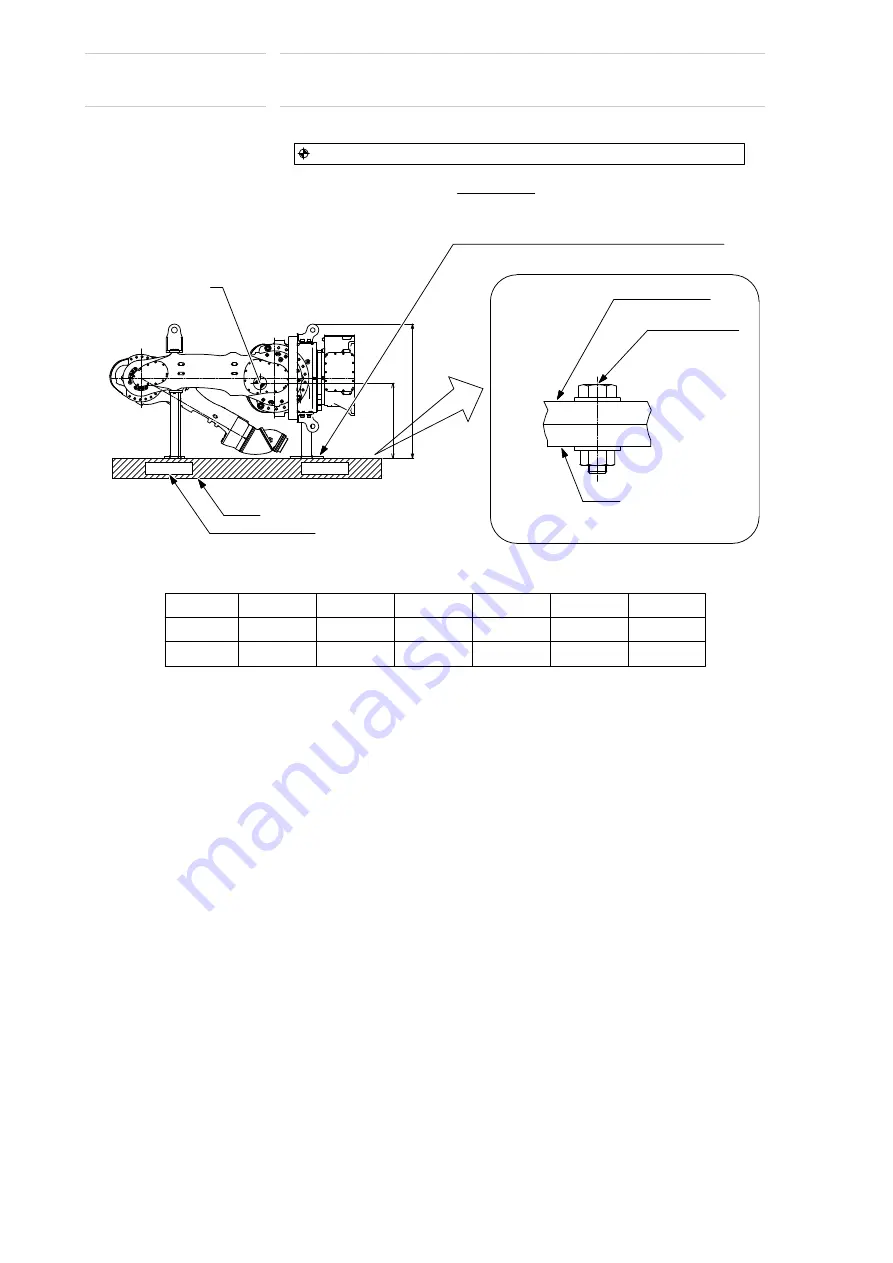
Fig. 2-2(c): Transport Using a Forklift (Wall-mounted)
(Optional
)
G
562.9
(1005)
0
-144625
0
0°
T-axis
0°
B-axis
0
0°
R-axis
-60°
U-axis
0
0°
L-axis
0
0°
S-axis
Factory setting for angle and pulse of each axis
Axis
Angle
Pulse
Pallet
Manipulator base
Hexagon socket
head cap screw
M16 (6 screws)
Washer M16
(12 washers)
Nut M16 (6 nuts)
Fix the manipulator to the base for transportation
by using 17.5 dia. tapped hole (4 holes) (3 places).
Forklift claw entries
Pallet
Unit: [mm]
:Gravity center “G” : Manipulator and Shpping bolts and brackets
30 of 116
































































