





























3-2
180788-1CD
HW1484370
3
Installation
3.2 Mounting Procedures for Manipulator Base
MPX2600
3.2
Mounting Procedures for Manipulator Base
The manipulator should be firmly mounted on a baseplate or foundation
strong enough to support the manipulator and withstand repulsion forces
during acceleration and deceleration.
Construct a solid foundation with the appropriate thickness to withstand
maximum repulsion force of the manipulator. (Refer to
.)
A baseplate flatness must be kept at 0.5 mm or less: insufficient flatness
of installation surface may deform the manipulator shape and affect its
functional abilities.
section 3.2.1 “Mounting the Manipulator on the
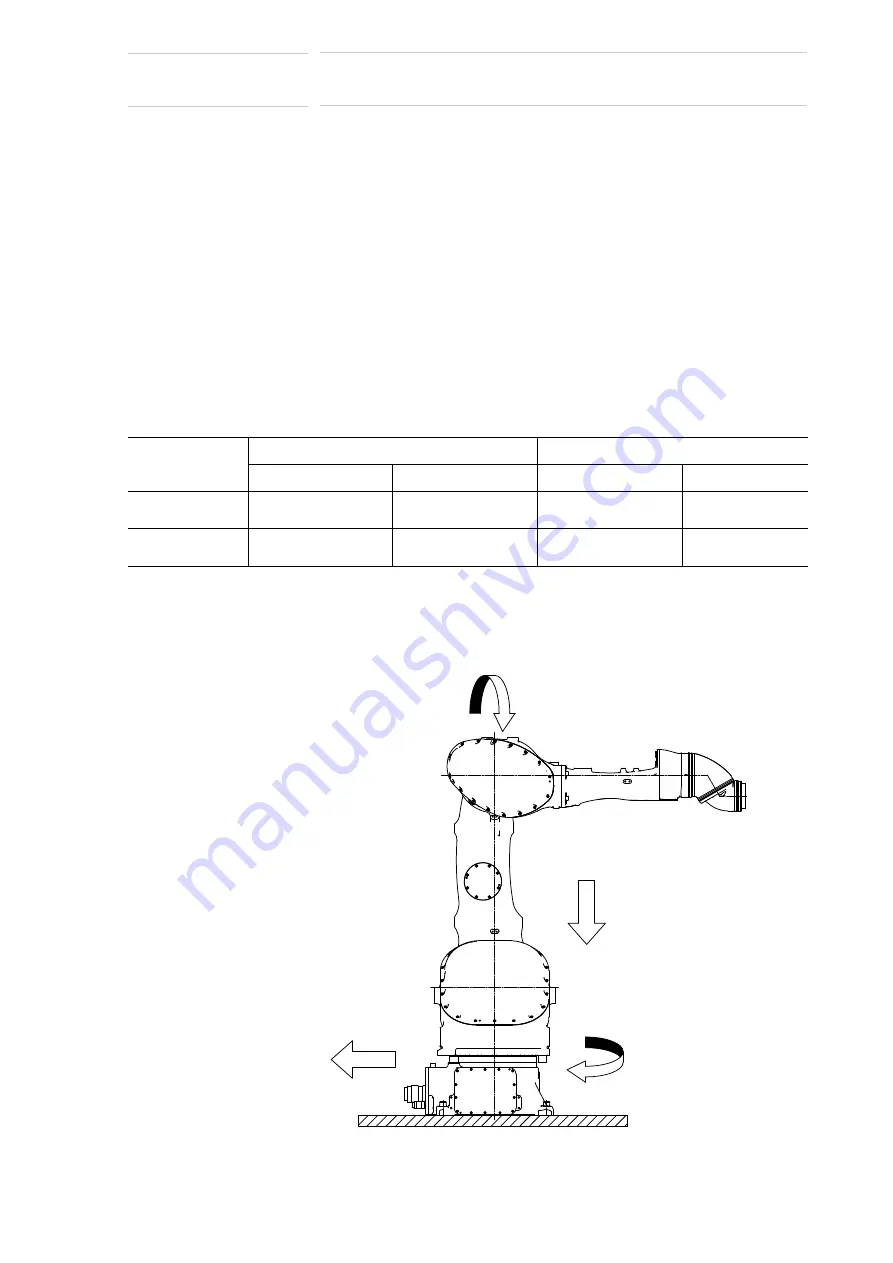
Fig. 3-1: Manipulator Repulsion Force
Table 3-1: Manipulator Repulsion Force
Horizontal rotation
Vertical rotation
Repulsion force F
H
Torque M
H
Repulsion force F
v
Torque M
V
Emergency stop
20580 N
(2100 kgf)
25480 N•m
(2600 kgf•m)
17640 N
(1800 kgf)
25480 N•m
(2600 kgf•m)
Acceleration/
deceleration
6370 N
(650 kgf)
7670 N•m
(780 kgf•m)
6860 N
(700 kgf)
9560 N•m
(975 kgf•m)
Mv
Mh
Fv
Fh
35 of 116




































































