




























9-21
167109-1CD
HW1482308
9
Maintenance and Inspection
9.4 Gas Maintenance Procedure in the Gas Balancer
MS165
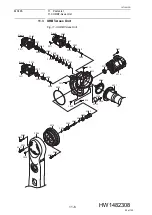
9.4.4.2 Gas Injecting Procedures
1. Move the manipulator to the home position and turn OFF the power
supply of the DX200.
2. Remove the cover and the hexagon socket head screw plug with
flange, which are mounted to the gas inlet, and insert the quick
connector.
3. Connect the gas filling device to the quick connector after confirming
that the blowdown valve, needle valve, and gate valve of the gas filling
device are firmly closed.
4. Check the temperature of the gas balancer surface.
5. Connect the nitrogen gas cylinder to the gas filling device.
6. Release the valve of the nitrogen gas cylinder, and then set the gas
pressure slightly higher than the adequate pressure shown in
“Adequate Gas Pressure per Gas Balancer Surface Temperature”
rotating the regulator handle of the gas filling device.
7. Slowly open the needle valve of the gas filling device.
8. Release the gate valve of the gas filling device to inject gas until the
gas pressure indicated by the digital pressure gauge is slightly higher
than the adequate pressure shown in
.
9. Close the gate valve of the gas filling device, wait for the gas pressure
in the gas balancer to stabilize, and then confirm that the gas pressure
is the adequate pressure shown in
table 9-9 “Adequate Gas Pressure
per Gas Balancer Surface Temperature”
.
If the pressure is higher than the adequate pressure, discharge the
gas gradually and stabilize the gas pressure, then confirm that the gas
pressure finally reached the adequate value.
10. Close needle valve of the gas filling device and the valve of the
nitrogen gas cylinder.
11. Disconnect the gas filling device from the quick connector.
12. Remove the quick connector and mount the cover, then tighten the
hexagon socket head screw plug M6 with flange by using a tightening
torque of 4.9 N•m (0.5 kgf•m).
13. Mount the cover and tighten the hexagon socket head cap screws M4
(length: 6mm) with a tightening torque of 2.8 N•m (0.29 kgf•m.)
DANGER
Before discharging/filling the gas from/into the gas balancer, confirm
that the L-axis motor brake is appropriately functioning and L-axis is
firmly fixed so that it will not rotate. Failure to observe this may cause
very dangerous situation due to releasing of the L-axis motor brake.
Because the L-axis without retaining force leads the L-arm to rotate by
the lengthened or shortened gas balancer.
NOTE
After discharging/injecting gas, wait for a few minutes to
stabilize the gas pressure, and then measure the gas pres-
sure.
82 of 100







































































