



























4.6 Job Example
4-11
4.6
Job Example
NOP
*G
'RESET
DOUT OG#(1) 0
DOUT OG#(2) 0
DOUT OG#(4) 0
DOUT OG#(8) 0
'RETURN TO HOME 1
PSTART JOB:R1 HOME 1 SUB1 (R1+S1)
PSTART JOB:R2 HOME 1 SUB2 (R2)
PWAIT SUB1
PWAIT SUB2
'WAITING FOR THE FIRST START
WAIT IN#(1)=ON
PSTART JOB:R1 WAIT SUB1 (R1)
PSTART JOB:R2 WAIT SUB2 (R2)
PWAIT SUB1
PWAIT SUB2
'TIP REPLACEMENT
JUMP *A IF IN#(2)=OFF
PSTART JOB:R1 TIP SUB1 IF IN#(2)=ON (R1)
PSTART JOB:R2 TIP SUB2 IF IN#(2)=ON (R2)
PWAIT SUB1
PWAIT SUB2
JUMP *G
*A
'WAITING FOR THE SECOND START
WAIT IN#(10)=ON
'RETURN TO HOME 1
JUMP *B IF IG#(3)<>99
PSTART JOB:R1 HOME 1 SUB1 (R1+S1)
PSTART JOB:R2 HOME 1 SUB2 (R2)
PWAIT SUB1
PWAIT SUB2
JUMP *G
*B
'WORK JOB
JUMP *C IF IG#(3)=0
'WORK 1
JUMP *E IF IG#(3)<>1
PSTART JOB:TES11-R1 SUB1 SYNC SUB2 (R1+S1)
PSTART JOB:TES11-R2 SUB2 (R2+S1)
PWAIT SUB1
PWAIT SUB2
*E
'WORK 2
JUMP *F IF IG#(3)<>2
PSTART JOB:TES12-R1 SUB1 SYNC SUB2 (R1+S1)
PSTART JOB:TES12-R2 SUB2 (R2+S1)
PWAIT SUB1
PWAIT SUB2
*F
JUMP *H IF IN#(2)=OFF
PSTART JOB:R1 CHIP SUB1 (R1)
PSTART JOB:R2 CHIP SUB2 (R2)
PWAIT SUB1
PWAIT SUB2
*C
DOUT OG#(4) 15
JUMP *C
END
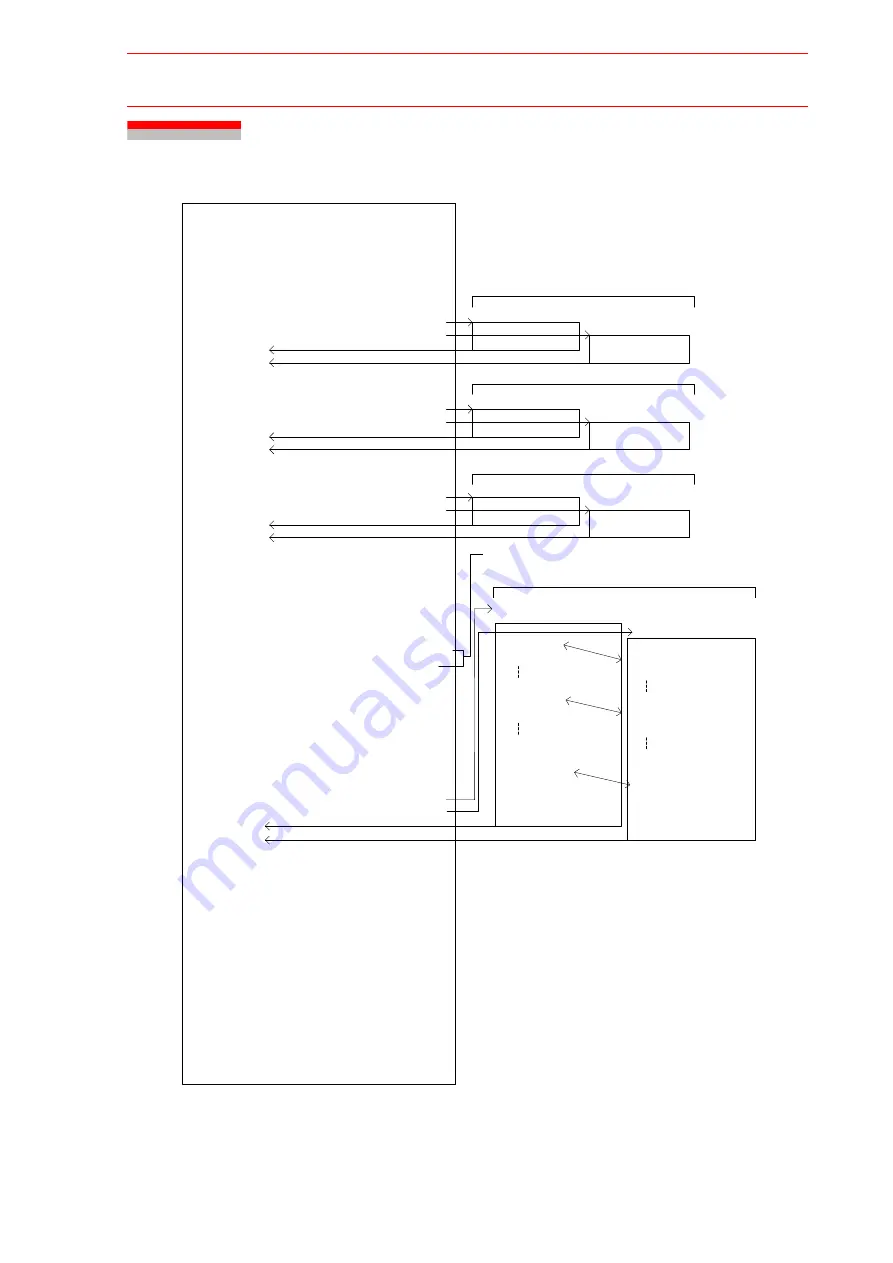
Master task
(Concurrent job or robot job witout control groups)
R1 WAIT (R1)
R1 HOME1 (R1+S1)
R2 HOME2 (R2)
R2 WAIT (R2)
R1 TIP (R1)
R2 TIP (R2)
Home position return
job
Waiting JOB
Tip replacement JOB
Work JOB (coordinated job)
NOP
TSYNC 1
MOVJ+MOVJ
SMOVL+MOVJ
TSYNC 2
ARCON
ARCOF
SMOVL+MOVJ
TSYNC 3
DOUT OT#(1)=OFF
MOVJ+MOVJ
END
NOP
TSYNC 1
MOVJ+MOVJ
SMOVL+MOVJ
TSYNC 2
ARCON
ARCOF
SMOVL+MOVJ
TSYNC 3
DOUT OT#(2)=OFF
MOVJ+MOVJ
END
TES11-R2(R2+S1)
TES11-R1(R1+S1)
(omitted)
Jobs in subtasks 1 and 2
75/210







































































