




























4.14 Creating a Job in a Subtask - Method 1 and 2
4-23
4.14
Creating a Job in a Subtask - Method 1 and 2
Subtasks 1 and 2 are robot jobs.
Subtask 1: Job of one manip the station
Subtask 2: Job of the other manip the station
There are two methods to create a robot job for a subtask.
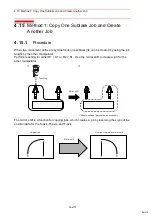
Method 1: Copy one subtask job to create another subtask.
This method is useful when two movement paths are symmetrical. Use the mirror shift func-
tion to convert a job path and copy it. The same teaching operation does not have to be
repeated.
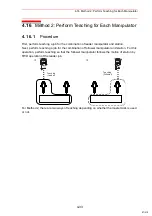
Method 2: Perform teaching for each manipulator.
Where there are not many similarities in the paths and movements of the two manipulators,
create jobs in Method 2.
Teaching
Mirror shift
Teaching
(Leader)
Teaching
(Follower)
HOLD
START
PLAY
TEACH
REMOTE
!?
HOLD
START
PLAY
TEACH
REMOTE
!?
87/210







































































