



























3
Home Position Return
3.1
Home Position Posture of Manipulator
3-1
HW1485471
HW1485471
3
Home Position Return
3.1
Home Position Posture of Manipulator
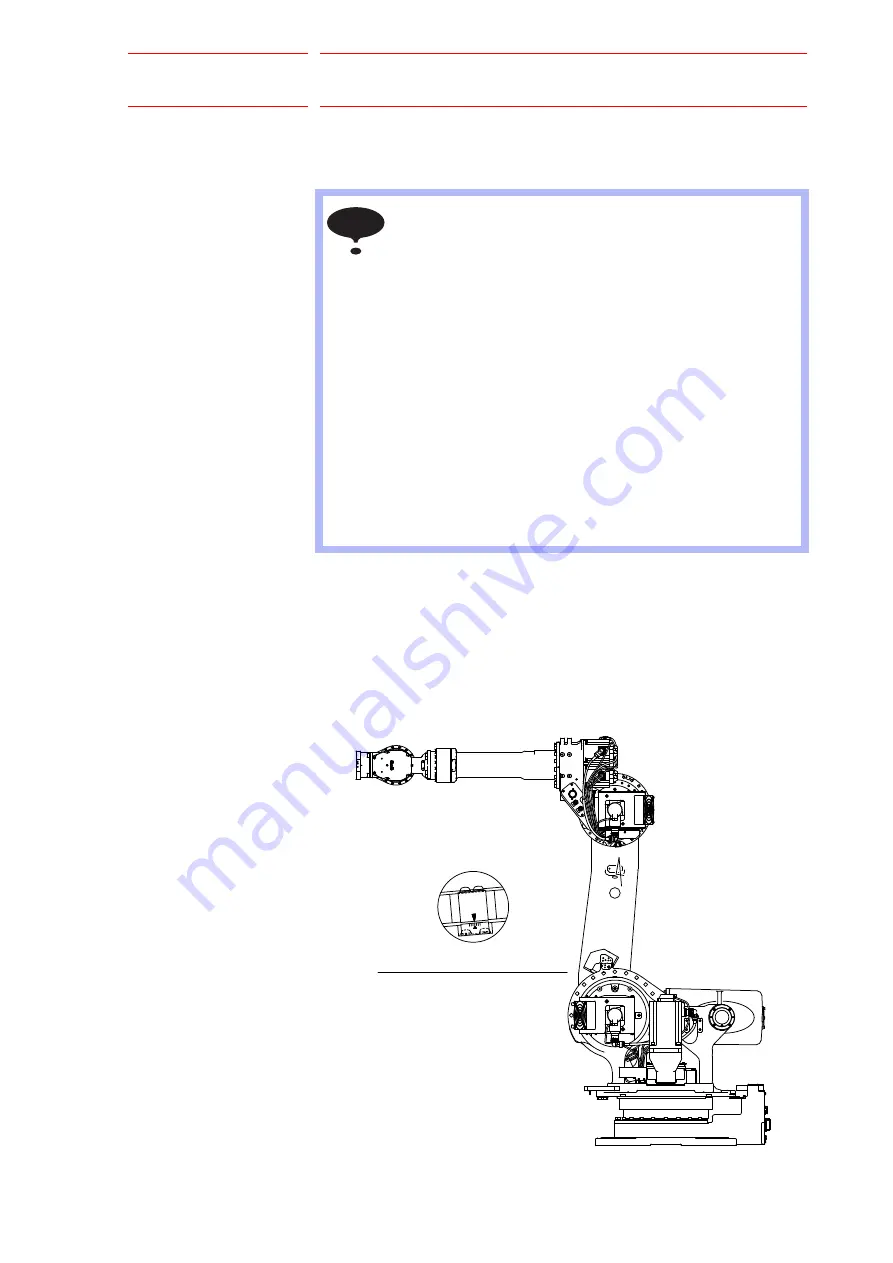
The home position of this manipulator is shown in
. Each axis has a home position mark as a guide for the home
position. The home position mark of the U-axis is shown below as an
example.
Fig. 3-1: Home Position Posture
NOTE
Reset the home position of the manipulator if the home
position is cleared or deviated. The YRC1000 stores the
position data of the job program (hereinafter called JOB) as
the pulse number from the home position of each axis.
Thus, by precisely resetting the home position, the JOB
used before resetting can be used without correction.
Perform home position return in one of the following cases:
• The motor or absolute encoder is replaced.
• Stored memory is cleared due to the run-out of the internal
battery.
• The home position is deviated by hitting the MOTOMAN
against a workpiece, etc.
• A main part such as a speed reducer is replaced or disas-
sembled and reassembled.
When performing home position return, be sure that no
external force is applied to the manipulator.
View A: Home position mark
A
17/134





































































