



























3
Home Position Return
3.3
Methods for Home Position Return
3-4
HW1485471
HW1485471
3.3.1.3 Home Position Adjustment
After the replacement, move the axis whose motor or speed reducer was
replaced to the position of the home position mark, and register the home
position tentatively. For details, refer to chapter 8.1 “Home Position
Calibration” in “YRC1000 INSTRUCTIONS (RE-CTO-A221)”.
Move the axis to the check-point by the check-JOB. Ensure that the
manipulator does not interfere with jigs, etc. when moving the axis.
Correct the deviation from the check-point created before the replacement
by moving only the axis whose motor or speed reducer was replaced.
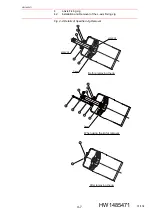
Display the position screen (COMMAND POSITION).
The following figure shows the values of the U-axis as an example.
By using the above values, calculate the amount of deviation. (Subtract
the CMD (command value) from the CURR (current value).)
U (-3067) - (-2989) = -78
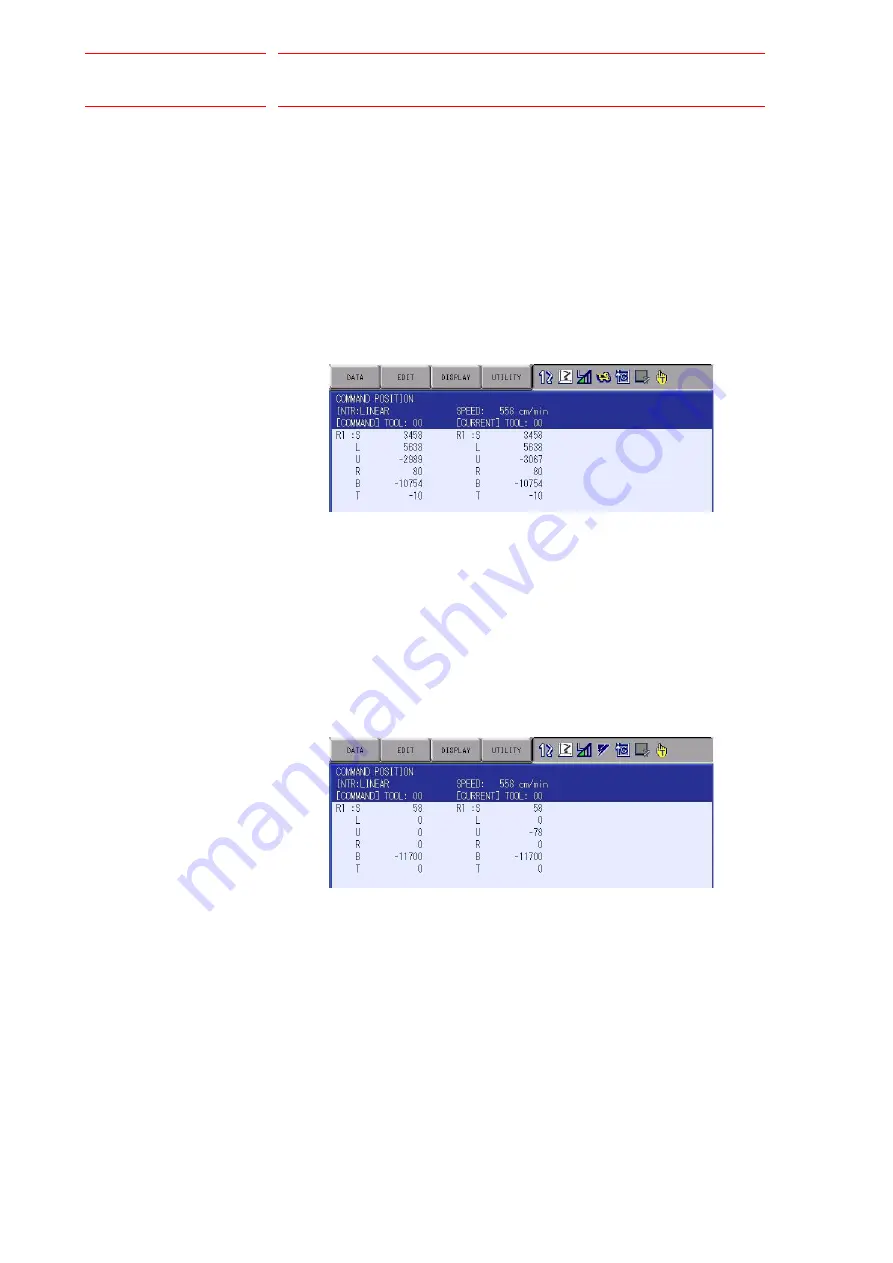
Perform stepping back, etc. of the check JOB to move the axis to the
position where the axis does not interfere with jigs, etc. when it moves to
the home position. Ensure that the manipulator does not interfere with
jigs, etc. when moving the axis. Refer to the position screen, and move
the axis to the position where the pulse number is equal to the amount of
deviation.
The following figure shows an example.
At this position, perform home position calibration only for the axis whose
motor or speed reducer was replaced. For details, refer to chapter 8.1
“Home Position Calibration” in “YRC1000 INSTRUCTIONS (RE-CTO-
A221)”.
Move the axis again to the check-point by the check-JOB. Confirm that
the axis is at the check-point created before the replacement. (If it is
deviated, repeat the adjustment procedure.)
Check the manipulator operation by using the JOB used before the
replacement. If there is no problem, write down the modified home
position data (ABSO data) and the date on the label inside of the
YRC1000.
Move the axis to the modified home position and check the position of the
home position mark. If the home position mark is deviated, modify the
home position mark.
20/134
































































