





























5-6
155492-1CD
HW0484820
SDA20
5 Basic Specifications
5.6 Operating Characteristics and Operating Method of the 7-Axis Arm
5.6
Operating Characteristics and Operating Method
of the 7-Axis Arm
The arm with 7 axes operates differently from the 6-axis arm, and requires the different
operating method.
The following sections explain how to operate the 7-axis arm based on the operation patterns
(the joint coordinate system, Cartesian coordinate system, etc.).
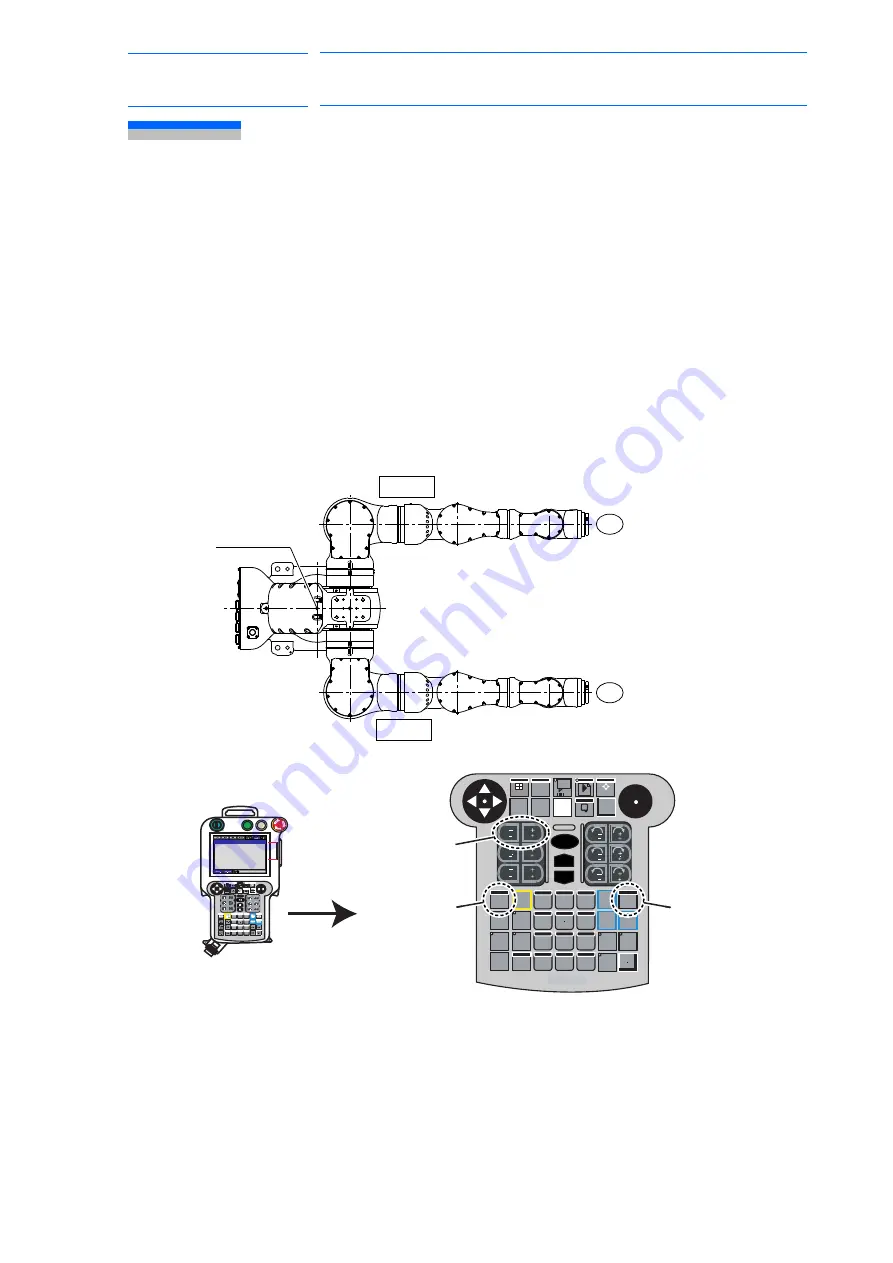
5.6.1
Operation in the Joint Coordinate System
Note the following point in operating the manipulator in the joint coordinate system:
• When operating the 7th-axis, hold the "SHIFT" key and press the "S+" or "S-" key.
Fig. 5-4: Operating the 7th-axis
HOLD
START
PLAY
TEACH
REMOTE
T
Z
T
Z
B
Y
R
X
B
Y
R
X
U
Z
U
Z
L
Y
S
X
L
Y
S
X
M O T O M A N
M O T O M A N
!?
7
4
2
3
.
−
5
6
0
8
1
9
Rotation-axis
R-axis B-axis T-axis
U-axis
L-axis
S-axis
S-axis
R2
R1
7th-axis
R-axis B-axis T-axis
U-axis
L-axis
T
Z
T
Z
B
Y
R
X
B
Y
R
X
HIGH
SPEED
FAST
LOW
MANUAL SPEED
U
Z
U
Z
L
Y
S
X
L
Y
S
X
SERVO ON
M O T O M A N
SELECT
SERVO
ON
READY
MAIN
MENU
SHORT
CUT
GO BACK
PAGE
AREA
LAYOUT
Multi
CANCEL
ASSIST
!?
DIRECT
OPEN
INFORM
LIST
BACK
SPACE
SHIFT
INTER
LOCK
ROBOT
EX. AXIS
MOTION
TYPE
TEST
START
BWD
INSERT
MODIFY ENTER
FWD
DELETE
SHIFT
7
4
2
3
.
−
5
6
0
8
1
9
COORD
[S+] or [S-] key
[Shift] key
[Shift] key
7th-axis
31 of 66






































































