





























SAFETY
Arc-WorldLite 50 System Manual
2-6
MOTO
MAN
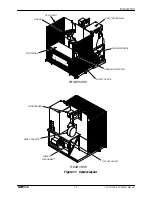
2.8
Maintenance Safety
All operators, programmers, plant and tooling engineers, maintenance personnel,
supervisors, and anyone working near the robot must become familiar with the
operation of this equipment. All personnel involved with the operation of the
equipment must understand potential dangers of operation. Maintenance tips are as
follows:
•
Do not perform any maintenance procedures before reading and
understanding the proper procedures in the appropriate manual.
•
Check all safety equipment for proper operation. Repair or replace any non-
functioning safety equipment immediately.
•
Improper operation can result in personal injury and/or damage to the
equipment. Only trained personnel familiar with the operation, manuals,
electrical design, and equipment interconnections of this robot should be
permitted to operate the system.
•
Back up all your programs and jobs onto a floppy disk whenever program
changes are made. A backup must always be made before any servicing or
changes are made to options, accessories, or equipment to avoid loss of
information, programs, or jobs.
•
Do not enter the robot cell while it is in automatic operation. Programmers
must have the teach pendant when they enter the cell.
•
The robot must be placed in Emergency Stop (E-STOP) mode whenever it is
not in use.
•
Be sure all safeguards are in place.
•
Use proper replacement parts.
•
This equipment has multiple sources of electrical supply. Electrical
interconnections are made between the controller, external servo box, and
other equipment. Disconnect and lockout/tagout all electrical circuits before
making any modifications or connections.
•
All modifications made to the controller will change the way the robot
operates and can cause severe personal injury or death, as well as damage the
robot. This includes controller parameters, ladder parts 1 and 2, and I/O
(Input and Output) modifications. Check and test all changes at slow speed.
•
Improper connections can damage the robot. All connections must be made
within the standard voltage and current ratings of the robot I/O (Inputs and
Outputs).







































































