


























Allowable load for wrist axis and wrist flange
7
-
42
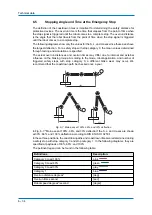
The permissible moment of inertia is calculated when the permissible torque reaches the
maximum value. The permissible moment of inertia for the T-axis varies and depends on
the permissible torque.
Contact your YASKAWA branch office in a timely manner if you have questions regarding
the calculation of the load or centroidal distance.
Example:
In the case of the YASKAWA HP20D robot, for example, the permissible moment of inertial
for the T-axis amounts to 0.25 kgm² at a permissible torque of 19.6 Nm and to 0.75 kgm² at
a permissible torque of 0.1 Nm.
Summary of Contents for MPL160-J00
Page 1: ...ROBOTICS MPL160 J00 YR MPL0160 J00 Operating and Maintenance Manual...
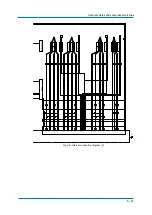
Page 36: ...Technical data 6 36 6 5 1 2 Stop position L axis 100 deflection deg deg s deg s sec...
Page 37: ...Technical data 6 37 6 5 1 3 Stop position U axis 100 deflection deg deg s deg s sec...
Page 61: ...Maintenance and inspection 9 61 Air outlet cap Joint 80 9 0 170 1 1 2 2 2 1 2...
Page 91: ...Parts lists 11 91...







































































