


























Internal cables and compressed air lines
8
-
46
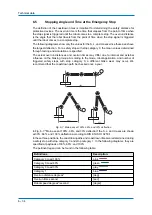
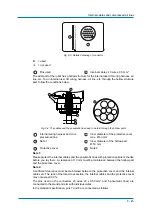
•
To the 3BC connection for the collision sensor on the U arm.
•
To the 3BC connection for the collision sensor on the robot controller.
Pins 7 and 8 of the respective 3BC connections on the connector plate and U arm are
connected to each other.
For the wiring, see the following figure, "Connecting diagram for internal connections."
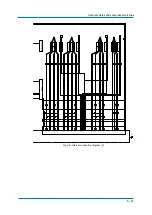
The internal connections of the robot are shown in the following diagrams "Connection
diagram A" and "Connection diagram B".
Fig. 8-5: Internal connection diagram (a)
21
-22
-21
-23
22
23
E
-5
-4
-3
-2
-9
-8
-7
-6
-1
-11
-13
-12
-18
-17
-16
-15
-14
-20
-19
-10
1
3
4
5
2
6
9
8
7
10
12
13
15
18
17
16
14
20
19
11
21
-22
-21
-23
22
23
-2
-3
-4
-5
-7
-8
-9
-6
-11
-13
-12
-18
-17
-16
-15
-14
-20
-19
-10
E
1
2
5
6
7
8
4
3
10
9
13
12
16
17
18
15
14
19
20
11
-1
(24-28)
S1
LA1
L
B1
S1(24-28)
BC2
BC1
LC2
LD2
DX200
BAT
P
BAT
0BT
P
BAT
P
0BT
0BT
0BT
BAT
P
6
BAT21
0BAT22
BAT22
2
3
4
1
7
8
0BAT11
0BAT21
BAT12
0BAT12
BAT11
4
5
1
3
2
26
32
1
2
31
30
27
29
28
PG0V1
PG5V1
BAT6
0BAT6
20
23
25
24
22
21
17
19
18
BAT2
BAT3
0BAT3
0BAT1
BAT1
0BAT2
8
6
7
5
6
PG5V3
8
7
4
5
3
PG5V2
PG0V3
PG0V2
3
2
4
1
12
13
14
15
16
10
11
9
PG5V6
PG0V6
CN1-5
CN1-4
0V
+24V
+24V
0V
CN1-9
CN1-10
P
P
CN1-10
CN1-4
CN1-5
CN1-9
+24V
+24V
0V
0V
0V
+24V
0V
+24V
-1
-3
-2
-4
1BC(10PX4)
No.20CN
X
No,5CN
-1
-4
-3
-2
BAT1
PG0V1
PG5V1
OBAT1
S
-1
No.1CN
P
P
P
PG
-6
BAT
-10
-9
-5
-4
BAT
OBT
OBT
+5V
0V
FG1
-2
DATA-1
DATA+1
S-AXIS
DATA-2
DATA+2
FG2
-10
BAT
OBT
No,6CN
OBAT2
PG5V2
BAT2
PG0V2
-2
-3
-4
-1
L
No.2CN
-1
-9
-6
-5
-4
-2
0V
BAT
OBT
+5V
L-AXIS
PG
DATA+3
DATA-3
-2
OBAT3
PG0V3
PG5V3
-4
-3
BAT3
No,7CN
-1
U
OBT
-5
-4
-9
-10
BAT
+5V
0V
OBT
FG3
No.3CN
-1
-2
-6
BAT
PG
U-AXIS
DATA-6
DATA+6
OBAT6
PG0V6
PG5V6
BAT6
No,8CN
-2
-3
-4
-1
T
No.4CN
-5
-4
-9
-10
-1
-2
-6
OBT
FG6
+5V
BAT
0V
OBT
BAT
T-AXIS
PG
CN1-1
SPG+1
CN1-2
SPG-1
P
CN1-1
CN1-2
SPG-1
SPG+1
CN1-3
FG1
C
N1-3
FG1
CN1-8
FG2
CN1-7
CN1-6
SPG-2
SPG+2
CN1-8
FG2
CN1-7
CN1-6
P
SPG-2
SPG+2
CN2-3
CN2-2
CN2-1
SPG-3
SPG+3
FG3
C
N2-3
CN2-2
CN2-1
P
SPG-3
SPG+3
FG3
CN3-8
CN3-7
CN3-6
SPG-6
SPG+6
FG6
C
N3-8
CN3-7
CN3-6
P
SPG-6
SPG+6
FG6
LB1
+24V
E
BC2
AL2
CN4-1
CN4-6
CN4-8
CN4-3
LB1
+24V
BC2
AL2
CN4-6
CN4-1
E
CN4-3
CN4-8
AL1
CN4-7
CN4-7
P
P
AL1
CN4-10
0V
CN4-10
LA2
LB2
LC2
LD2
LA2
LB2
LD1
LD2
LB1
LB2
LA3
LB3
LC3
LD3
LB2
LB1
LD2
LD1
CN2-10
CN2-10
+24V
CN2-4
+24V
CN2-4
LD1
CN2-5
P
CN2-5
LD1
LC1
L
D1
+24V
+24V
S
-A
X
IS
OV
ER
RU
N L.
S.
L
-A
X
IS
OV
ER
RU
N L.
S.
L AND U-AXIS INT
E
R
F
E
R
E
N
C
E
L
.S
.
LA
1
LB
1
LB
2
LB
2
LA
2
LB
1
A1
A2
A3
Connected to
Connected to
Connected to
S-
AX
IS
O
V
E
R
R
U
N
L
.S
.
L
-A
X
IS
OV
ER
RU
N L.
S.
L AND U-AXIS INT
E
R
F
E
R
E
N
C
E
L
.S
.
LC
1
LD
1
LD
2
LD
2
LC
2
LD
1
B1
B2
B3
Connected to
Connected to
Connected to
S-
AX
IS
O
V
E
R
R
U
N
L
.S
.
LA
1
LB
1
LB
1
A1
Connected to
S-
AX
IS
O
V
E
R
R
U
N
L
.S
.
LC
1
LD
1
LD
1
B1
Connected to
LC
1
LD
1
LD
1
LD
2
LD
3
LC
3
LA
1
LB
1
LB
1
LB
2
LB
3
LA
3
LC
1
LA
1
P
P
P
P
P
P
P
P
P
A2
B2
A3
B3
A1
B1
AL1
AC1
AL2
AC2
S
FAN
For lamp (option)
For S-axis fan (option)
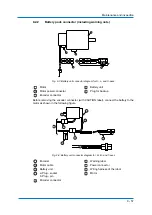
SLU-axes with Limit Switch Specification
S-axis with Limit Switch Specification
1. For the limit switch specification, the connection of the section
Notes
A
B
and parts are changed as follows:
Internal Wire
Summary of Contents for MPL160-J00
Page 1: ...ROBOTICS MPL160 J00 YR MPL0160 J00 Operating and Maintenance Manual...
Page 36: ...Technical data 6 36 6 5 1 2 Stop position L axis 100 deflection deg deg s deg s sec...
Page 37: ...Technical data 6 37 6 5 1 3 Stop position U axis 100 deflection deg deg s deg s sec...
Page 61: ...Maintenance and inspection 9 61 Air outlet cap Joint 80 9 0 170 1 1 2 2 2 1 2...
Page 91: ...Parts lists 11 91...






























































